Questões de Concurso Sobre engenharia eletrônica
Foram encontradas 4.396 questões
Sobre as distorções do sinal em RF, analise as afirmativas a seguir e assinale (V) para a verdadeira e (F) para a falsa.
( ) Distorção harmônica é a geração de harmônicos da frequência do sinal de entrada no sinal de saída.
( ) A distorção de frequência ocorre quando o amplificador responde da mesma forma a diferentes frequências do sinal de entrada.
( ) Os amplificadores da classe AB corrigem a distorção de crossover, um fenômeno que surge quando os dois transistores entram na região de corte devido ao módulo do sinal de entrada não superar o módulo da tensão de polarização da junção baseemissor do transistor.
As afirmativas são, respectivamente,
Considerando um amplificador da classe C, seu ângulo de condução
Após instalação do sistema, foi executado a função “autoajuste” presente no controlador PI, que estabeleceu um par de valores iniciais para as constantes Kp e Ti do respectivo controlador.
Em seguida, o sistema passou por um teste de validação, que consistiu na execução de um degrau na referência, com intuito de verificar como o sistema seguia a temperatura pré-determinada.
Ao analisar a resposta do sistema, verificou-se que a temperatura do forno possuía tempo de subida adequado, mas com tempo excessivo para eliminação de erro de estado estacionário.
Neste caso, para melhorar a resposta transitória desse sistema, se faz necessário
Considere um sistema de controle com realimentação unitária, cuja função de transferência de malha aberta possui um polo na origem.
Quanto ao erro de regime permanente ao seguir sinais do tipo degrau e rampa, esse sistema apresentará
Considere que determinado sistema de controle é representado pela sua função de transferência de malha aberta M(s), dada por

Com relação a estabilidade deste sistema, analise as afirmativas a seguir.
I. É independente do valor do parâmetro k.
II. É independente do valor do parâmetro a.
III. É independente dos valores dos parâmetros b e c.
Está correto o que se afirma em

em que x1, x2 são estados e u a entrada.
Após a inserção de um controlador por realimentação de estados de ganho K = [2 4] , o sistema em malha fechada passa a ter polos em
Com relação às características do controle por realimentação de estados observados de ordem completa, analise as afirmativas a seguir.
I. A dinâmica do observador não é observável do ponto de vista de entrada e saída da planta.
II. A ordem do controlador é sempre superior à ordem da planta.
III. O ganho do regulador interfere na alocação de polos da planta.
Está correto o que se afirma em
Uma maneira de contornar esse problema é fazer uso de um observador de estado de ordem completa, cuja matriz de ganhos do observador (comumente associada a letra L) tem a função de
Considere um sistema de controle que, após ser excitado por um sinal de banda estreita, produz um sinal de saída y(t) com a seguinte representação no domínio da frequência:

Os valores de y(t) para t = 0 e t → ∞ são, respectivamente,
Considere que um determinado sistema dinâmico possui uma realização em espaço de estados inicial, e que essa realização é “rotacionada” para uma nova realização através de uma matriz de transformação P.
Com relação à transformação de similaridade empregada na matriz de estado da realização inicial, analise as afirmativas a seguir.
I. Consiste na mudança das bases da matriz transformada.
II. Preserva autovalores da matriz transformada.
III. A matriz de transformação P deve ser unitária.
Está correto o que se afirma em
em que: f(t) = força de controle (entrada do modelo)
d = distância entre o ponto de aplicação da força de controle e o centro de massa
I = momento de inércia
a(t) = ângulo de orientação do satélite (saída do modelo)
Foram atribuídos os seguintes valores para os parâmetros do sistema: d = 1,2 m e I = 4.000 kgm².
A equipe analisou o comportamento do satélite sujeito a diferentes sinais de entrada.
Assinale a opção que contém a resposta temporal do modelo a dois pulsos sequenciais, com as seguintes características: um pulso de 20 N, em t = 10s, com uma pequena duração de apenas 0,1s e um outro pulso em t = 20s, com mesma duração e intensidade, mas com magnitude negativa. Os pulsos podem ser considerados como excitações impulsivas.

em que:
u = sinal temporal da entrada do sistema;
y = sinal temporal da saída do sistema;
b = coeficiente de atrito viscoso do amortecedor; e
k = constante da mola.
Considere que o comando step (num, den) fornece o gráfico da resposta temporal ao degrau unitário de um sistema linear, cujos coeficientes dos polinômios do numerador e do denominador da sua função de transferência são, respectivamente, os vetores num e den.
O engenheiro implementou o seguinte pseudocódigo para analisar o sistema de suspensão do veículo:
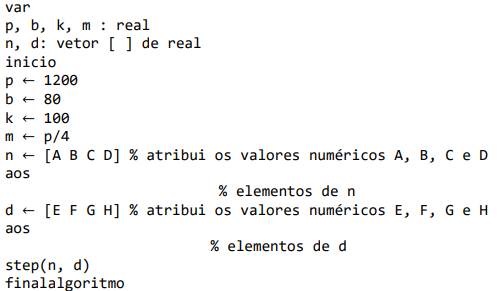
Assinale a opção que contém os valores numéricos dos vetores n e d, necessários à obtenção da resposta do sistema a uma entrada do tipo rampa unitária, utilizando o algoritmo acima.
Com relação aos itens que apresentam vantagens quanto ao uso de um sistema baseado em PLC, um deles é o(a)
( ) Em controle de processos, sistemas em malha aberta possibilitam o ajuste das variáveis controladas à medida que as variáveis de entrada são perturbadas.
( ) Em leituras de visores analógicos de instrumentos de medição é comum ocorrer o erro de Paralaxe, que está ligado ao incorreto posicionamento do usuário em relação ao equipamento.
( ) Uma desvantagem dos instrumentos digitais é a existência de diversos protocolos de comunicação no mercado, o que dificulta a comunicação entre equipamentos de marcas diferentes.
( ) A repetibilidade de um instrumento de medição se refere à sua capacidade de produzir leituras consistentes e próximas entre si quando a mesma medição é realizada repetidamente, mesmo sob diferentes condições de operação.
As afirmativas são, respectivamente,
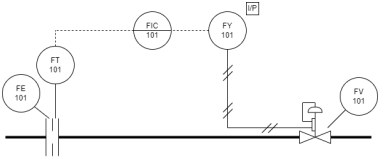
( ) O elemento final de controle de fluxo é acionado de forma pneumática e possui um posicionador.
( ) O controlador de fluxo está montado em um painel local, acessível ao operador.
( ) Toda comunicação entre transmissor, controlador e conversor é por meio de rede ethernet em protocolo Fieldbus.
( ) A principal função do conversor FY-101 é permitir controlar a porcentagem de abertura da válvula, em vez de apenas se a válvula está aberta ou fechada.
As afirmativas são, respectivamente,
Os estudos realizados pelo francês Jean-Baptiste J. Fourier, no século XVIII, contribuem de forma significativa em diversas áreas das ciências aplicadas e engenharias.
Fourier demonstrou que um sinal periódico pode ser representado por uma série trigonométrica infinita. Um estudante de engenharia eletrônica desenvolveu um algoritmo para plotar um gráfico de uma curva aproximada de uma onda quadrada, considerando apenas alguns termos da série, com o seguinte pseudocódigo:
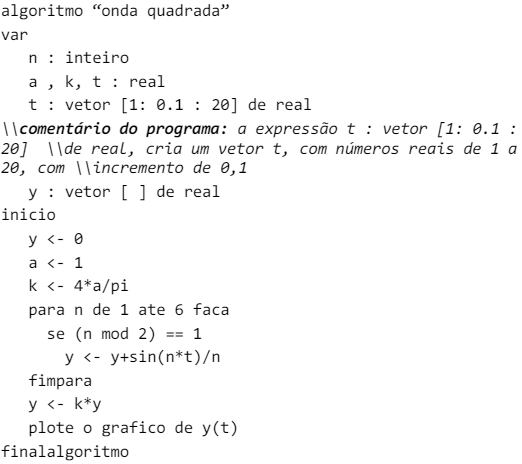
Assinale a opção que contém a expressão correspondente aos
termos da Série de Fourier consideradas pelo estudante no
algoritmo desenvolvido para plotar a curva.
Considere que um processo industrial em malha fechada seja representado pela função de transferência P(s), dada por

Sabendo que a > 5b, a resposta de P(s) ao degrau unitário
A respeito do condicionamento de sinais, analise os itens a seguir:
I. O aumento do ganho empregado em um amplificador perfeitamente linear reduz a largura de banda do sinal oriundo da medição.
II. Devido a presença de componentes de baixa frequência o ideal é o emprego de um filtro passa alta antes da amostragem A/D para mitigar o aliasing.
III. Os circuitos de condicionamento de sinal podem incluir circuitos de proteção que evitam danos ao sensor ou ao equipamento no caso de sobrecarga ou em condições adversas.
Está correto o que se afirma em
Para garantir uma representação digital precisa do sinal a frequência mínima necessária do conversor analógico-digital, em MHz, é de:
Nesse contexto, considere um sistema em que um transdutor analógico é conectado a um conversor A/D por meio de um amplificador linear, onde este último tem a função de ajustar o nível de tensão que entra no conversor de modo a assegurar a melhor representação digital do sinal na conversão. Sabe-se ainda que a saída do transdutor analógico varia de 0mV a 100mV, enquanto a faixa de entrada do conversor analógico-digital é de 0V a 10V.
Nessas condições, o ganho de tensão do amplificador linear, em decibéis (dB), é: