Questões de Concurso Sobre engenharia eletrônica
Foram encontradas 4.398 questões

Considere que o circuito combinacional mostrado na figura acima seja implementado com portas lógicas com tecnologia TTL. Suponha que as entradas do circuito sejam representadas pelas variáveis A, B, C, D e E e que a saída do circuito seja representada pela variável S. Com relação a esse circuito, julgue o item subsequente.
Se a entrada E assumir o valor 1, então a saída S assumirá o
valor 1, independentemente dos valores assumidos pelas
variáveis A, B, C e D.
Considere que o circuito combinacional mostrado na figura acima seja implementado com portas lógicas com tecnologia TTL. Suponha que as entradas do circuito sejam representadas pelas variáveis A, B, C, D e E e que a saída do circuito seja representada pela variável S. Com relação a esse circuito, julgue o item subsequente.
Se as entradas A, B, C, D e E assumirem, respectivamente, os
valores 1, 1, 0, 1 e 1, então a saída S assumirá o valor 1.

A tabela verdade acima descreve um circuito combinacional com entradas A, B e C, e saída S. Com relação a essa tabela, julgue o item que se segue.
Embora não seja a expressão booleana mínima para a saída S,
a expressão booleana  expressa corretamente a saída S em função das entradas A, B
e C.
expressa corretamente a saída S em função das entradas A, B
e C.
A tabela verdade acima descreve um circuito combinacional com entradas A, B e C, e saída S. Com relação a essa tabela, julgue o item que se segue.
Na forma produto de somas, a expressão booleana mínima para
a saída S é dada por 
A tabela verdade acima descreve um circuito combinacional com entradas A, B e C, e saída S. Com relação a essa tabela, julgue o item que se segue.
Considerando-se a forma soma de produtos, a expressão
booleana mínima para a saída S é dada por 
 , na qual
, na qual  .
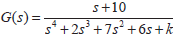
.Assinale a alternativa que determine qual(is) valor(es) de k a função de transferência G(s) tem os pólos alocados no semi-plano da esquerda.
Dados:
Assinale a alternativa correta.
Um sistema linear é modelado pelas seguintes equações

em que as constantes  e as variáveis físicas
e as variáveis físicas  .
.
A entrada do sistema é u(t) e a saída medida é y(t).
 desse sistema é:
desse sistema é:
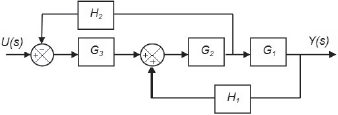
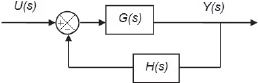
Considerando a entrada (U(s)) e a saída (Y(s)), a função transferência resultante equivalente a estrutura dos blocos da figura é:
A respeito dos controladores PID, pode-se dizer que:
I. Usualmente, as perturbações no carregamento são de baixa frequência, já os sensores de ponta são de alta frequência.
II. O controle PID geralmente traz bons resultados se a planta dinâmica dominante é de segunda ordem.
III. A antecipação da ação derivativa reage à taxa rápida de variação do erro.
Assinale:
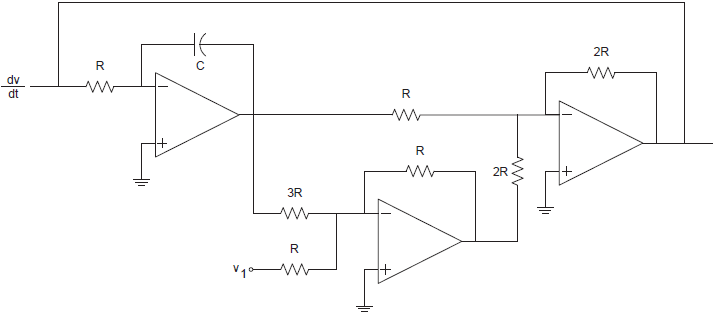
Considerando RC = 1, a equação matemática implementada pelo computador analógico da figura acima é:
Na figura, as etapas são caracterizadas pela letra A, as transições pela letra f e as ações pela letra M.

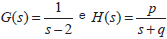
A montagem é feita de forma que a saída de G1(s) é a entrada de G2(s), conforme ilustra a figura.

Para as funções de transferências definidas por
 afirma-se:
afirma-se:I. Para uma entrada R(s) limitada, a saída Y(s) também é limitada (BIBO estabilidade)
PORQUE
II. O produto de G1(s) por G2(s) resulta em uma função de transferência estável.
 ; o vetor de saída y∈
; o vetor de saída y∈ ; o vetor de entrada u∈
; o vetor de entrada u∈ ; k ∈
; k ∈ (incremento discreto); as matrizes são invariantes no tempo, têm dimensões compatíveis com os vetores e são formadas por números reais.
(incremento discreto); as matrizes são invariantes no tempo, têm dimensões compatíveis com os vetores e são formadas por números reais.Por meio de uma transformada de similaridade de S1, obtida utilizando uma matriz T∈
 n×n | ∃T−1 , define-se o sistema S2.
n×n | ∃T−1 , define-se o sistema S2.A figura a seguir apresenta, em condições ideais de funcionamento, uma programação em linguagem de contatos (ou LADDER) em que o contato normalmente aberto B é energizado por uma botoeira (por cerca de um segundo) e os contatos definidos como D estão associados a uma chave.
No esquema: T0 e T1 são temporizadores e estão associados aos tempos de t1 s e t2 s, com t2 > t1; e M0, M1 e M2 são motores. O contato D está desligado e só é acionado após os três motores estarem em funcionamento.

Os acionadores funcionam baseados na variação da tensão, corrente, frequência ou de uma combinação destas.
PORT (a, b, c: IN bit;
d, e: OUT bit);
END entidade;
ARCHITECTURE arquitetura OF entidade IS
BEGIN
PROCESS (a, b, c)
BEGIN
IF (c = '1') THEN
d <= a XOR b;
e <= a AND b;
ELSE
d <= '0';
e <= '0';
END PROCESS;
END arquitetura;
Para o sistema linear contínuo
 (t ) = Ax(t) + Bu(t) e y(t) = Cx(t) + Du(t) , definido pelas matrizes:
(t ) = Ax(t) + Bu(t) e y(t) = Cx(t) + Du(t) , definido pelas matrizes: A =
 ; B =
; B =  ; C = [ f g]; D = 0 ; e {a,b, c, d, f , g}∈
; C = [ f g]; D = 0 ; e {a,b, c, d, f , g}∈ .
.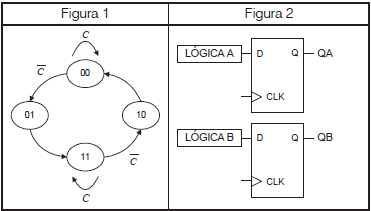
A Figura 1, acima, mostra um diagrama de quatro estados definidos pelos bits B e A, sendo B o mais significativo, e pelo bit de controle C.
A Figura 2, por sua vez, mostra uma implementação síncrona desse diagrama de estados com o uso de flip-flops D e das lógicas A e B.
Estas lógicas devem ser, respectivamente: