Questões Militares
Foram encontradas 81 questões
Resolva questões gratuitamente!
Junte-se a mais de 4 milhões de concurseiros!
Ano: 2012
Banca:
Marinha
Órgão:
Quadro Complementar
Prova:
Marinha - 2012 - Quadro Complementar - Segundo-Tenente - Engenharia - Controle e Automação |
Q641374
Engenharia de Automação
Assinale a opção que apresenta os níveis de tensão correspondentes
aos níveis lógicos 0 e 1, respectivamente, na interface
serial RS-232.
Ano: 2012
Banca:
Marinha
Órgão:
Quadro Complementar
Prova:
Marinha - 2012 - Quadro Complementar - Segundo-Tenente - Engenharia - Controle e Automação |
Q641373
Engenharia de Automação
Texto associado
Analise a configuração do regulador chaveado da figura a seguir
.
.
Em relação à tensão de saída desse circuito, é correto afirmar
que é
Ano: 2012
Banca:
Marinha
Órgão:
Quadro Complementar
Prova:
Marinha - 2012 - Quadro Complementar - Segundo-Tenente - Engenharia - Controle e Automação |
Q641369
Engenharia de Automação
Assinale a opção que somente apresenta componentes construtivos
de um robô industrial.
Ano: 2012
Banca:
Marinha
Órgão:
Quadro Complementar
Prova:
Marinha - 2012 - Quadro Complementar - Segundo-Tenente - Engenharia - Controle e Automação |
Q641368
Engenharia de Automação
De acordo com a Federação Internacional de Robótica (IFR),
assinale a opção que NÃO apresenta uma configuração básica
de robô, quanto à estrutura mecânica.
Ano: 2011
Banca:
Marinha
Órgão:
Quadro Complementar
Prova:
Marinha - 2011 - Quadro Complementar - Segundo-Tenente - Engenharia - Controle e Automação |
Q251568
Engenharia de Automação
Considere o diagrama de blocos apresentado a seguir.

Simplificando-se o diagrama de blocos acima, assinale a opção que apresenta a função resultante [C (s) /R (s) ] .
Simplificando-se o diagrama de blocos acima, assinale a opção que apresenta a função resultante [C (s) /R (s) ] .
Ano: 2011
Banca:
Marinha
Órgão:
Quadro Complementar
Prova:
Marinha - 2011 - Quadro Complementar - Segundo-Tenente - Engenharia - Controle e Automação |
Q251566
Engenharia de Automação
Em relação aos tipos de sistemas de controle, assinale a opção correta.
Ano: 2011
Banca:
Marinha
Órgão:
Quadro Complementar
Prova:
Marinha - 2011 - Quadro Complementar - Segundo-Tenente - Engenharia - Controle e Automação |
Q251565
Engenharia de Automação
Determine a derivada de f se f(x) = 3x2 + 24 e assinale a opção correta.
Ano: 2011
Banca:
Marinha
Órgão:
Quadro Complementar
Prova:
Marinha - 2011 - Quadro Complementar - Segundo-Tenente - Engenharia - Controle e Automação |
Q251563
Engenharia de Automação
Em relação à programação de robôs industriais, assinale a opção correta.
Ano: 2011
Banca:
Marinha
Órgão:
Quadro Complementar
Prova:
Marinha - 2011 - Quadro Complementar - Segundo-Tenente - Engenharia - Controle e Automação |
Q251562
Engenharia de Automação
Analise as seguintes afirmativas a respeito do controle liga-desliga (on-off).
I - O controle de duas posições é relativamente simples e barato e, por esta razão, extremamente utilizado tanto em sistemas de controle industriais como em sistemas de controle domésticos.
II - Considere-se u(t) o sinal de saída do controlador e e(t) o sinal de erro atuante. Em um controle de duas posições, o sinal u(t)sempre permanece igual a um valor máximo, independente do sinal de erro atuante ser positivo ou negativo.
III- Em um sistema de controle de duas posições, o elemento atuante possui apenas duas posições fixas que são, em muitos casos, simplesmente "ligado" ou "deligado" .
Assinale a opção correta.
I - O controle de duas posições é relativamente simples e barato e, por esta razão, extremamente utilizado tanto em sistemas de controle industriais como em sistemas de controle domésticos.
II - Considere-se u(t) o sinal de saída do controlador e e(t) o sinal de erro atuante. Em um controle de duas posições, o sinal u(t)sempre permanece igual a um valor máximo, independente do sinal de erro atuante ser positivo ou negativo.
III- Em um sistema de controle de duas posições, o elemento atuante possui apenas duas posições fixas que são, em muitos casos, simplesmente "ligado" ou "deligado" .
Assinale a opção correta.
Ano: 2011
Banca:
Marinha
Órgão:
Quadro Complementar
Prova:
Marinha - 2011 - Quadro Complementar - Segundo-Tenente - Engenharia - Controle e Automação |
Q251561
Engenharia de Automação
Analise a função apresentada a seguir.
f(t) = sen(wt) para t > 0
Assinale a opção que apresenta a transformada z da função f(t).

f(t) = sen(wt) para t > 0
Assinale a opção que apresenta a transformada z da função f(t).
Ano: 2011
Banca:
Marinha
Órgão:
Quadro Complementar
Prova:
Marinha - 2011 - Quadro Complementar - Segundo-Tenente - Engenharia - Controle e Automação |
Q251560
Engenharia de Automação
Em relação às propriedades das matrizes e dos determinantes, assinale a opção correta.
Ano: 2011
Banca:
Marinha
Órgão:
Quadro Complementar
Prova:
Marinha - 2011 - Quadro Complementar - Segundo-Tenente - Engenharia - Controle e Automação |
Q251558
Engenharia de Automação
Considere o sistema representado a seguir em equações de espaço de estado.

Onde:
u(t) = entrada do sistema
y(t) = saída do sistema
x1(t) e x2 (t) = variáveis de estado
Assinale a opção que apresenta a função de transferência do sistema acima.
Onde:
u(t) = entrada do sistema
y(t) = saída do sistema
x1(t) e x2 (t) = variáveis de estado
Assinale a opção que apresenta a função de transferência do sistema acima.
Ano: 2011
Banca:
Marinha
Órgão:
Quadro Complementar
Prova:
Marinha - 2011 - Quadro Complementar - Segundo-Tenente - Engenharia - Controle e Automação |
Q251557
Engenharia de Automação
Dada a função f definida pot f(x) = x2 + 4x - 4, é correto afirmar que f(2) é igual a:
Ano: 2011
Banca:
Marinha
Órgão:
Quadro Complementar
Prova:
Marinha - 2011 - Quadro Complementar - Segundo-Tenente - Engenharia - Controle e Automação |
Q251551
Engenharia de Automação
Considere a transformação linear T: R3-→ R2 e as bases ß e β' apresentadas a seguir.
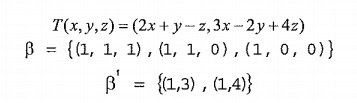
Assinale a opção que apresenta a matriz associada à transformação linear T em relação às bases ß e ß'.
associada à transformação linear T em relação às bases ß e ß'.
Assinale a opção que apresenta a matriz
associada à transformação linear T em relação às bases ß e ß'.
Ano: 2011
Banca:
Marinha
Órgão:
Quadro Complementar
Prova:
Marinha - 2011 - Quadro Complementar - Segundo-Tenente - Engenharia - Controle e Automação |
Q251549
Engenharia de Automação
Assinale a opção que completa corretamente as lacunas das sentenças abaixo.
A adição de um polo à função de transferência em malha aberta tem por efeito puxar o lugar das raízes para a ...................... , tendendo a tornar o sistema mais e a acomodação da resposta mais .................... . A adição de um zero à função de transferência em malha aberta tem por objetivo puxar o lugar das raízes para a ................... , tendendo a tornar o sistema mais ................ e a acomodação da resposta mais .................... .
A adição de um polo à função de transferência em malha aberta tem por efeito puxar o lugar das raízes para a ...................... , tendendo a tornar o sistema mais e a acomodação da resposta mais .................... . A adição de um zero à função de transferência em malha aberta tem por objetivo puxar o lugar das raízes para a ................... , tendendo a tornar o sistema mais ................ e a acomodação da resposta mais .................... .
Ano: 2011
Banca:
Marinha
Órgão:
Quadro Complementar
Prova:
Marinha - 2011 - Quadro Complementar - Segundo-Tenente - Engenharia - Controle e Automação |
Q251548
Engenharia de Automação
Considere as matrizes A e B apresentadas a seguir.

Em relação às matrizes acima, é correto afirmar que os
Em relação às matrizes acima, é correto afirmar que os
Ano: 2011
Banca:
Marinha
Órgão:
Quadro Complementar
Prova:
Marinha - 2011 - Quadro Complementar - Segundo-Tenente - Engenharia - Controle e Automação |
Q251547
Engenharia de Automação
Com relação às propriedades das matrizes, assinale a opção INCORRETA .
Ano: 2011
Banca:
Marinha
Órgão:
Quadro Complementar
Prova:
Marinha - 2011 - Quadro Complementar - Segundo-Tenente - Engenharia - Controle e Automação |
Q251545
Engenharia de Automação
Considere a transformada z (Y (z) ) apresentada a seguir.

Sendo a, k e T constantes e k = 1, 2, ..., assinale a opção que apresenta a transformada z inversa y (kT) da função acima.
Sendo a, k e T constantes e k = 1, 2, ..., assinale a opção que apresenta a transformada z inversa y (kT) da função acima.
Ano: 2011
Banca:
Marinha
Órgão:
Quadro Complementar
Prova:
Marinha - 2011 - Quadro Complementar - Segundo-Tenente - Engenharia - Controle e Automação |
Q251542
Engenharia de Automação
Um amplificador operacional ligado como seguidor de tensão tem ganho de tensão igual a:
Ano: 2011
Banca:
Marinha
Órgão:
Quadro Complementar
Prova:
Marinha - 2011 - Quadro Complementar - Segundo-Tenente - Engenharia - Controle e Automação |
Q251541
Engenharia de Automação
Em relação à resposta de frequência de sistema de controle, assinale a opção correta.