Questões da Prova Marinha - 2011 - Quadro Complementar - Segundo-Tenente - Engenharia - Controle e Automação
Foram encontradas 50 questões
Resolva questões gratuitamente!
Junte-se a mais de 4 milhões de concurseiros!
Ano: 2011
Banca:
Marinha
Órgão:
Quadro Complementar
Prova:
Marinha - 2011 - Quadro Complementar - Segundo-Tenente - Engenharia - Controle e Automação |
Q251563
Engenharia de Automação
Em relação à programação de robôs industriais, assinale a opção correta.
Ano: 2011
Banca:
Marinha
Órgão:
Quadro Complementar
Prova:
Marinha - 2011 - Quadro Complementar - Segundo-Tenente - Engenharia - Controle e Automação |
Q251562
Engenharia de Automação
Analise as seguintes afirmativas a respeito do controle liga-desliga (on-off).
I - O controle de duas posições é relativamente simples e barato e, por esta razão, extremamente utilizado tanto em sistemas de controle industriais como em sistemas de controle domésticos.
II - Considere-se u(t) o sinal de saída do controlador e e(t) o sinal de erro atuante. Em um controle de duas posições, o sinal u(t)sempre permanece igual a um valor máximo, independente do sinal de erro atuante ser positivo ou negativo.
III- Em um sistema de controle de duas posições, o elemento atuante possui apenas duas posições fixas que são, em muitos casos, simplesmente "ligado" ou "deligado" .
Assinale a opção correta.
I - O controle de duas posições é relativamente simples e barato e, por esta razão, extremamente utilizado tanto em sistemas de controle industriais como em sistemas de controle domésticos.
II - Considere-se u(t) o sinal de saída do controlador e e(t) o sinal de erro atuante. Em um controle de duas posições, o sinal u(t)sempre permanece igual a um valor máximo, independente do sinal de erro atuante ser positivo ou negativo.
III- Em um sistema de controle de duas posições, o elemento atuante possui apenas duas posições fixas que são, em muitos casos, simplesmente "ligado" ou "deligado" .
Assinale a opção correta.
Ano: 2011
Banca:
Marinha
Órgão:
Quadro Complementar
Prova:
Marinha - 2011 - Quadro Complementar - Segundo-Tenente - Engenharia - Controle e Automação |
Q251561
Engenharia de Automação
Analise a função apresentada a seguir.
f(t) = sen(wt) para t > 0
Assinale a opção que apresenta a transformada z da função f(t).

f(t) = sen(wt) para t > 0
Assinale a opção que apresenta a transformada z da função f(t).
Ano: 2011
Banca:
Marinha
Órgão:
Quadro Complementar
Prova:
Marinha - 2011 - Quadro Complementar - Segundo-Tenente - Engenharia - Controle e Automação |
Q251560
Engenharia de Automação
Em relação às propriedades das matrizes e dos determinantes, assinale a opção correta.
Ano: 2011
Banca:
Marinha
Órgão:
Quadro Complementar
Prova:
Marinha - 2011 - Quadro Complementar - Segundo-Tenente - Engenharia - Controle e Automação |
Q251559
Engenharia de Automação
Observe a seguinte figura.
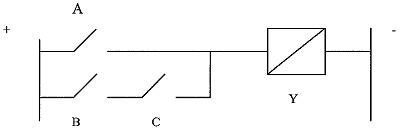
Na linguagem LADDER, cada contato, ao assumir dois estados, representa uma variável booleana.
Assinale a opção que apresenta a expressão booleana que representa o circuito acima.
Na linguagem LADDER, cada contato, ao assumir dois estados, representa uma variável booleana.
Assinale a opção que apresenta a expressão booleana que representa o circuito acima.