Questões Militares
Sobre pesquisa operacional em engenharia de produção
Foram encontradas 23 questões
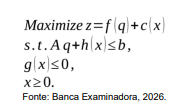
Aqui q e x são conjuntos disjuntos de variáveis de decisão, modelando respectivamente a quota de recuperação ambiental e as taxas de produção. Ainda, f(q) é a função utilidade da interferência ambiental, c(x) é a função de custos de produção, A é uma matriz quadrada e inversível, que mede o consumo de insumos para garantir a ecoeficiência, e h(x) é o consumo de insumos para a produção, cuja soma está sujeita a um vetor de disponibilidade máxima b. Há requisitos de demanda mínima a atender com a atividade produtiva modelados por g(x). Por hipótese, f(q) é suposta ser uma função côncava e c(x) é suposta ser uma função côncava.
Determine os preços de equilíbrio econômico λ que atribuem valores às ações de recuperação/preservação ambiental, associados com a alocação ótima dos insumos disponíveis, e marque a opção correta.
● Custo de preparação (Setup) K = R$ 200,00. ● Custo unitário de produção C = R$ 0,10. ● Custo unitário de estocagem h = R$ 0,02.
A demanda semanal pelo item fabricado é dada por:

Ao determinar a política ótima de produção e estocagem utilizando o Algoritmo de Wagner-Within, verifica-se para o vetor de produção P, o vetor de estoques I e o custo mínimo de atendimento da demanda, os seguintes valores, respectivamente:
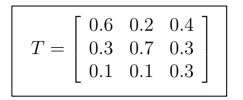
Determine o vetor de probabilidades de estado estacionário para esses sistemas e marque a opção correta.
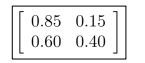
Determine o vetor de probabilidades de estado estacionário para esse sistema e marque a opção correta.
0 ≤ x1 ≤ 1, 0 ≤ x2 ≤ 1 e 0 ≤ x3 ≤ 1.
Use as Condições de Karush-Kuhn-Tucker(KKT) para determinar a alocação de desempenho máximo e o valor de z max , e, em seguida, marque a opção correta.
Seja o problema geral de programação quadrática sujeito a restrições de igualdade e escrito em forma matricial, com as matrizes Q e A e o vetor c como parâmetros, isto é:
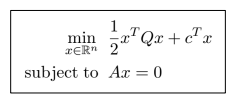
As condições de otimalidade de primeira ordem (KKT) para o problema acima, resulta em:
Use as Condições de Karush-Kuhn-Tucker(KKT) para determinar a alocação de desempenho máximo e o valor de z max e, em seguida, marque a opção correta.
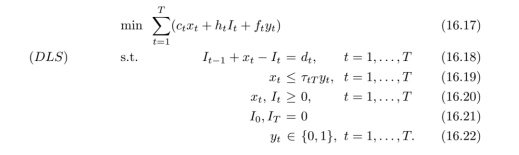
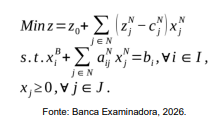
Existe ainda uma reformulação de (16.17)-(16.22), denominada (RDLS) na forma:
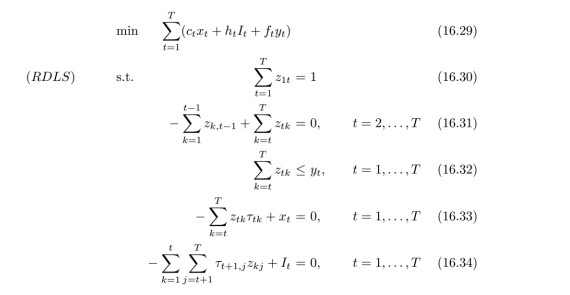
Fonte: R. Kipp Martin, Large Scale Linear and Integer Optimization: A Unified Approach, Springer Science & Business Media, 1999, chapter 16, pp. 575 - 582.
Marque a opção que determina e justifica corretamente qual das formulações matemáticas deve-se utilizar para resolver o problema supracitado através de um resolvedor de programas lineares inteiro-mistos de propósito geral.
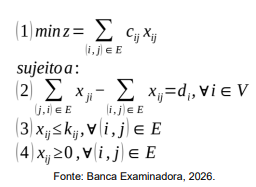
Denominando os preços duais das restrições (2) de ui para cada vértice i do grafo, e os preços duais das restrições (3) de vij para cada arco (i, j), pode-se afirmar que a forma geral das inequações duais associadas a esse problema, seria dada por:
Precedence diagramo f assembly tasks
Fonte: Juan Ignacio Anel, Pau Català, Moisès Serra, Bruno Domenech, "New Matrix Methodology for Algorithmic Transparency in Assembly Line Balancing Using a Genetic Algorithm", Operations Research Perspectives, Volume 9, 2022, 100223, ISSN 2214-7160, https://doi.org/10.1016/j.orp.2022.100223 (open access).
Marque a opção em que a sequência de produção está incorreta (infactível).
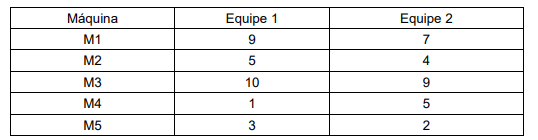
Considerando a tabela acima, determine a solução de eficiência máxima e marque qual é a produtividade máxima alcançável.

Determine o sequenciamento ótimo usando o Algoritmo de Johnson. A seguir, calcule o tempo total para completar a sequência de tarefas (Makespan) e marque a opção correta.

Qual é sequência ótima para esse conjunto de tarefas usando o Algoritmo de Johnson?
Seja a tabela final SIMPLEX dada abaixo.
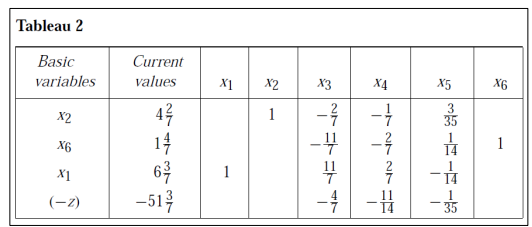
Outra forma para os planos de corte fracionários de Gomory faz uso da função piso, que arredonda valores fracionários para o inteiro imediatamente inferior:

Aqui xn faz referência aos índices das variáveis não básicas da tabela. Ao aplicar a equação para a segunda linha da tabela, em que x6 é a variável básica, o plano de corte gerado seria:
Seja o programa inteiro dado a seguir e sua árvore Branch and Bound:
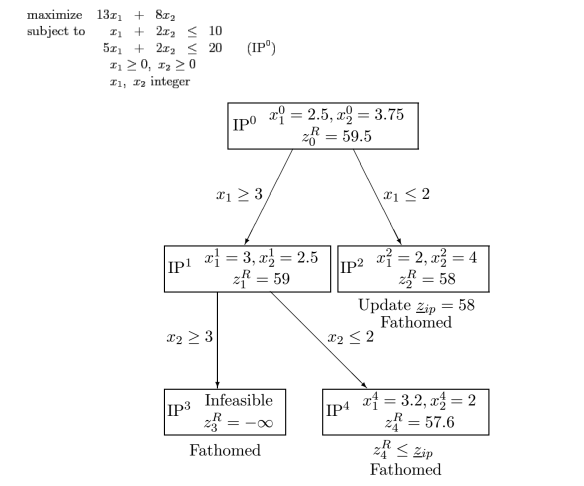
Fonte: ‘Branch-And-Bound Methods for Integer Programming’, by J. E. Mitchell, disponível em http://eaton.math.rpi.edu/faculty/Mitchell/papers/leeejem.pdf ou https://mitchjrpi.github.io/papers/leeejem.html.
Considerando que ramos da árvore Branch and Bound podem ser podados por integralidade, inviabilidade ou qualidade, quantos dos três (03) nodos-folha (terminais) da árvore acima podem ser podados?
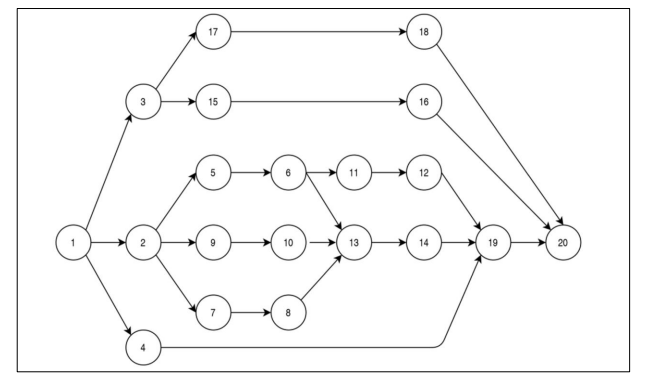
Seja o problema de gestão de projetos (PERT/CPM) dado a seguir:
Activity-on-Arc PERT/CPM Network
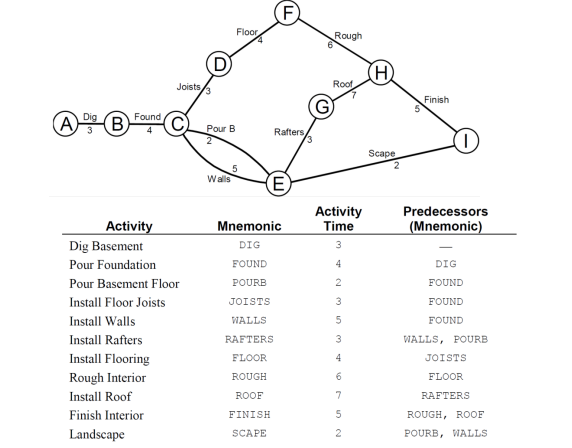
Fonte: Optimization Modelling with LINGO – Lindo Systems Inc. 5a
. Edição – disponível em https://www.lindo.com/downloads/LINGO_text/Chapter8.pdf.
Ao estimar o número de planos-de-corte necessários para determinar o caminho crítico integral para realização do projeto completo, encontra-se:
Fonte: Otimização Linear – Editora UnB - Capítulo 10 – Seção 10.2 - pp. 199, disponível em https://marciafampa.com/pdf/Otimizacao-LinearMaculan-Fampa.pdf.
Considere a tabela final SIMPLEX dada a seguir e observe que os termos independentes são arrolados na coluna x0, quantos planos de corte no formato dado acima estariam violados?

Iterações do método primal do simplex
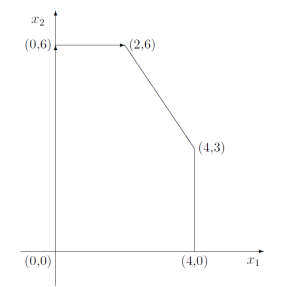
Fonte: Otimização Linear – Editora UnB - Capítulo 3 – Seção 3.2 - pp. 23, https://marciafampa.com/pdf/Otimizacao-Linear-Maculan-Fampa.pdf.
Nessa instância, a sequência de bases percorrida pelo algoritmo primal SIMPLEX é (0,0), (0,6) e (2,6), quando então o algoritmo prova a otimalidade da última solução extremal. Assumindo ausência de degeneração e sabendo que a expressão geral para os custos reduzidos SIMPLEX pode ser reduzida a [ uT A – c T ] x, os valores que são avaliados para essa expressão em cada solução extremal para x1 e x2, respectivamente, são: