Questões de Concurso
Para engenharia eletrônica
Foram encontradas 4.410 questões
Resolva questões gratuitamente!
Junte-se a mais de 4 milhões de concurseiros!
Considere que um determinado sistema dinâmico possui uma realização em espaço de estados inicial, e que essa realização é “rotacionada” para uma nova realização através de uma matriz de transformação P.
Com relação à transformação de similaridade empregada na matriz de estado da realização inicial, analise as afirmativas a seguir.
I. Consiste na mudança das bases da matriz transformada.
II. Preserva autovalores da matriz transformada.
III. A matriz de transformação P deve ser unitária.
Está correto o que se afirma em
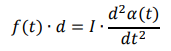
em que: f(t) = força de controle (entrada do modelo)
d = distância entre o ponto de aplicação da força de controle e o centro de massa
I = momento de inércia
a(t) = ângulo de orientação do satélite (saída do modelo)
Foram atribuídos os seguintes valores para os parâmetros do sistema: d = 1,2 m e I = 4.000 kgm².
A equipe analisou o comportamento do satélite sujeito a diferentes sinais de entrada.
Assinale a opção que contém a resposta temporal do modelo a dois pulsos sequenciais, com as seguintes características: um pulso de 20 N, em t = 10s, com uma pequena duração de apenas 0,1s e um outro pulso em t = 20s, com mesma duração e intensidade, mas com magnitude negativa. Os pulsos podem ser considerados como excitações impulsivas.

em que:
u = sinal temporal da entrada do sistema;
y = sinal temporal da saída do sistema;
b = coeficiente de atrito viscoso do amortecedor; e
k = constante da mola.
Considere que o comando step (num, den) fornece o gráfico da resposta temporal ao degrau unitário de um sistema linear, cujos coeficientes dos polinômios do numerador e do denominador da sua função de transferência são, respectivamente, os vetores num e den.
O engenheiro implementou o seguinte pseudocódigo para analisar o sistema de suspensão do veículo:
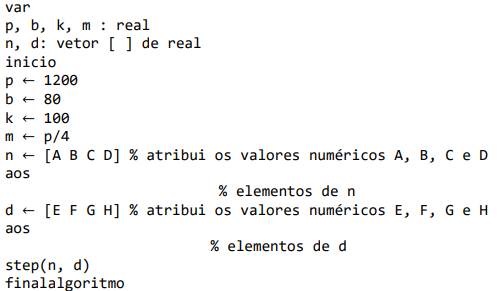
Assinale a opção que contém os valores numéricos dos vetores n e d, necessários à obtenção da resposta do sistema a uma entrada do tipo rampa unitária, utilizando o algoritmo acima.
Com relação aos itens que apresentam vantagens quanto ao uso de um sistema baseado em PLC, um deles é o(a)
( ) Em controle de processos, sistemas em malha aberta possibilitam o ajuste das variáveis controladas à medida que as variáveis de entrada são perturbadas.
( ) Em leituras de visores analógicos de instrumentos de medição é comum ocorrer o erro de Paralaxe, que está ligado ao incorreto posicionamento do usuário em relação ao equipamento.
( ) Uma desvantagem dos instrumentos digitais é a existência de diversos protocolos de comunicação no mercado, o que dificulta a comunicação entre equipamentos de marcas diferentes.
( ) A repetibilidade de um instrumento de medição se refere à sua capacidade de produzir leituras consistentes e próximas entre si quando a mesma medição é realizada repetidamente, mesmo sob diferentes condições de operação.
As afirmativas são, respectivamente,
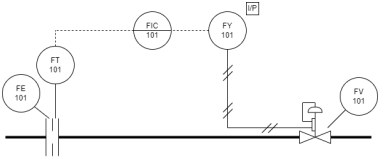
( ) O elemento final de controle de fluxo é acionado de forma pneumática e possui um posicionador.
( ) O controlador de fluxo está montado em um painel local, acessível ao operador.
( ) Toda comunicação entre transmissor, controlador e conversor é por meio de rede ethernet em protocolo Fieldbus.
( ) A principal função do conversor FY-101 é permitir controlar a porcentagem de abertura da válvula, em vez de apenas se a válvula está aberta ou fechada.
As afirmativas são, respectivamente,
Os estudos realizados pelo francês Jean-Baptiste J. Fourier, no século XVIII, contribuem de forma significativa em diversas áreas das ciências aplicadas e engenharias.
Fourier demonstrou que um sinal periódico pode ser representado por uma série trigonométrica infinita. Um estudante de engenharia eletrônica desenvolveu um algoritmo para plotar um gráfico de uma curva aproximada de uma onda quadrada, considerando apenas alguns termos da série, com o seguinte pseudocódigo:
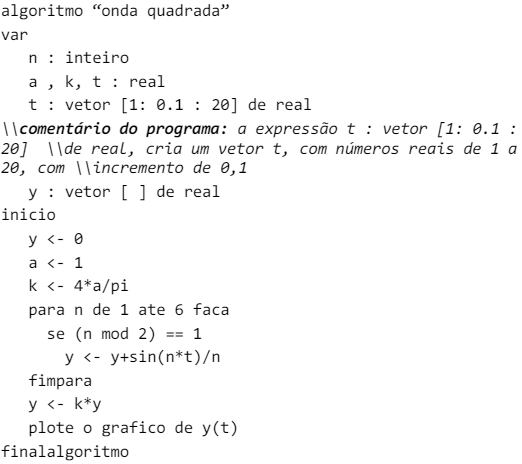
Assinale a opção que contém a expressão correspondente aos
termos da Série de Fourier consideradas pelo estudante no
algoritmo desenvolvido para plotar a curva.
Considere que um processo industrial em malha fechada seja representado pela função de transferência P(s), dada por

Sabendo que a > 5b, a resposta de P(s) ao degrau unitário
A respeito do condicionamento de sinais, analise os itens a seguir:
I. O aumento do ganho empregado em um amplificador perfeitamente linear reduz a largura de banda do sinal oriundo da medição.
II. Devido a presença de componentes de baixa frequência o ideal é o emprego de um filtro passa alta antes da amostragem A/D para mitigar o aliasing.
III. Os circuitos de condicionamento de sinal podem incluir circuitos de proteção que evitam danos ao sensor ou ao equipamento no caso de sobrecarga ou em condições adversas.
Está correto o que se afirma em
Para garantir uma representação digital precisa do sinal a frequência mínima necessária do conversor analógico-digital, em MHz, é de:
Nesse contexto, considere um sistema em que um transdutor analógico é conectado a um conversor A/D por meio de um amplificador linear, onde este último tem a função de ajustar o nível de tensão que entra no conversor de modo a assegurar a melhor representação digital do sinal na conversão. Sabe-se ainda que a saída do transdutor analógico varia de 0mV a 100mV, enquanto a faixa de entrada do conversor analógico-digital é de 0V a 10V.
Nessas condições, o ganho de tensão do amplificador linear, em decibéis (dB), é:
Com relação as características dos sensores de temperatura, analise os itens a seguir:
I. Quanto menos linear for a saída do sensor, mais fácil será calibrar e minimizar a incerteza no escalonamento de saída.
II. O tempo de resposta é o tempo necessário que um sensor leva para responder a uma mudança de temperatura.
III. A estabilidade de um sensor é um indicativo de sua habilidade em manter uma resposta consistente em uma temperatura específica.
Está correto o que se afirma em
T −1 = ɑ + b ln(R) , onde T é a temperatura em K, R é a resistência em Ω, e a,b são constantes. Sabe-se ainda que o termistor com temperatura T1 possui resistência R1, e que na temperatura T2 o valor de sua resistência dobra com relação a R1.
Nestas condições, o valor de T2−1 − T1−1 é:
O número mínimo de bits necessários para selecionar as portas do multiplexador e a taxa de amostragem máxima de cada sensor, respectivamente, são:
• R1: 50 mΩ, tolerância de 0,5% e potência de 500mW;
• R2: 100 mΩ, tolerância de 0,5% e potência de 500mW; e
• R3: 100 mΩ, tolerância de 1% e potência de 1W.
A respeito do desempenho de cada um destes três resistores caso aplicado no sensor de corrente elétrica, analise os itens a seguir:
I. O resistor R1 permite medir uma faixa maior de valores de corrente elétrica em comparação com o R2.
II. Em relação à precisão, não há diferença no emprego de R2 e R3, uma vez que ambos têm o mesmo valor de resistência.
III. Em termos de faixa de valores de corrente elétrica, os resistores R1 e R3 possuem capacidades de medição idênticas.
Está correto o que se afirma em
Sabendo que o resistor permanecia em 25 OC antes do início teste, durante a execução do teste este resistor atingirá a temperatura, em OC, de:
As especificações desse sensor estabelecem que a maior tensão que pode ser medida nos terminais do resistor é 200mV. Para realizar a medição de corrente, foi selecionado um resistor de 100mΩ, cuja potência máxima admitida é 500mW.
Sabendo que os componentes não podem operar em condições que ultrapassem suas respectivas especificações, a maior corrente que pode ser medida, em A (amperes), é:
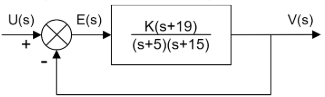
( ) Para K = 75, este sistema apresenta um erro de regime permanente de 5% em relação a entrada em degrau.
( ) Para K = 300 o erro de seguimento a uma entrada em rampa é de 2%.
( ) A constante de erro de velocidade é infinita, KV = ∞.
( ) Para esse sistema não há valor positivo de K que resulte em instabilidade.
As afirmativas são, respectivamente,
Considere log 5 = 0,699 e √0,96 = 0,98.
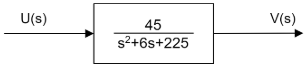
I. Caso este sistema seja submetido a uma entrada periódica com frequência de 15 rad/s ocorrerá uma ressonância e a amplitude da saída tenderá linearmente ao infinito.
II. Este sistema é subamortecido e apresenta resposta ao degrau com comportamento oscilatório amortecido com frequência de aproximadamente 2,34 Hz.
III. O ganho DC desse sistema é aproximadamente -14 dB.
Está correto o que se apresenta em:
A medição de nível de líquidos e sólidos armazenados tem papel fundamental na indústria atual, com base nisso relacione as tecnologias de medição de nível com suas principais características.
1. Tipo Ultrassônico
2. Tipo Deslocador
3. Tipo Capacitivo
4. Tipo Radar
( ) Usado para fluídos limpos e não recomendado para líquidos viscosos, com sólidos em suspensão ou pastas. Não sofre influência de espumas ou vapores.
( ) Usa sinais de corrente de radiofrequência e depende das características elétricas do material sob medição e da geometria do tanque.
( ) Medição é afetada pela presença de bolhas ou espuma na superfície. Acúmulo de condensação e poeira no transdutor reduz a precisão. Não funciona em ambientes com vácuo ou alta pressão.
( ) Sem partes móveis e opera sem contato com o objeto a ser medido. Alcance limitado na medição de líquidos não condutivos.
Assinale a opção que indica a relação correta na ordem apresentada.