Questões de Concurso
Para automação
Foram encontradas 726 questões
Resolva questões gratuitamente!
Junte-se a mais de 4 milhões de concurseiros!
Um padrão amplamente utilizado em instrumentação industrial é o sinal de corrente contínua na faixa de 4 mA a 20 mA. Um técnico de instrumentação, responsável por uma planta industrial, deseja realizar a medida da corrente de saída de um sensor de temperatura que opera na faixa de 0 °C a 160 °C. O sensor utiliza o padrão de 4-20 mA para indicar ao equipamento de leitura a temperatura do local de exposição.
Se a leitura de corrente verificada pelo técnico é de 16 mA, a temperatura medida pelo sensor é de
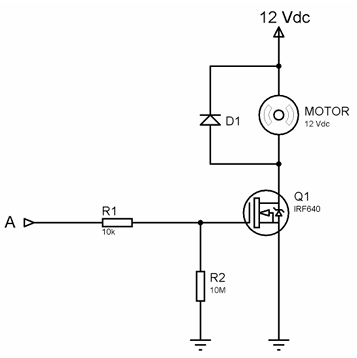
Sobre o circuito, a função do diodo D1 é
Nas áreas de instrumentação, automação e eletrônica é comum o uso de motores elétricos para converter sinais elétricos em movimentos mecânicos. Em algumas aplicações há a necessidade que a rotação do motor elétrico utilizado ocorra com incrementos fixos e discretos.
O tipo de motor que possui essa característica é denominado
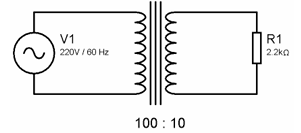
Sabendo que o número de espiras do enrolamento primário é 10 vezes maior que o número de espiras do secundário, a tensão do enrolamento secundário e a corrente que circula no enrolamento primário são, respectivamente,
Observe o circuito resistivo a seguir.
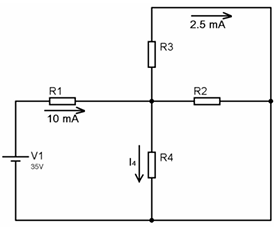
As correntes que atravessam os resistores R1 e R3 são conhecidas e estão indicadas no circuito.
Sabendo que R2 = 10R1 e R2 = R3, determine a corrente elétrica I4 que atravessa o resistor R4.
A norma NBR 8896 estabelece símbolos gráficos para sistemas e componentes hidráulicos e pneumáticos.
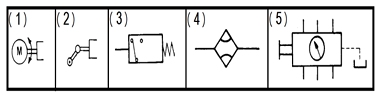
Considerando os símbolos, indique a representação gráfica correta de um pressostato.
Um transformador abaixador tem relação de transformação de tensão de 10:1.
Sabendo que a tensão medida em seu enrolamento secundário, em circuito aberto (sem carga), é de 12V, determine o valor da fonte de tensão conectada ao enrolamento primário.
O esquema a seguir mostra um exemplo de circuito de sonda de alta tensão com atenuação de 100:1 realizando a medida de uma fonte de tensão alternada e devidamente conectada a um voltímetro AC.
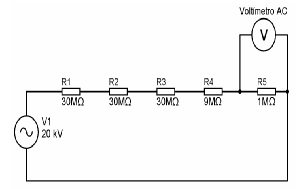
O valor mostrado pelo voltímetro, se a sonda estiver conectada a uma tensão (V1) de 20 kV, será
Um amperímetro DC configurado na escala de corrente com fundo de escala de 10 A, mostra a seguinte leitura: 0.010 A
O valor medido, convertido para miliamperes (mA), corresponde a:
Sobre as ações do controlador PID, assinale a opção correta.
I. Buffers baseados em amplificadores operacionais são utilizados antes de conversores analógico-digitais (ADC) para impedir que a impedância de entrada do conversor provoque carregamento do sinal e distorça a leitura.
II. Filtros anti-aliasing devem possuir frequência de corte inferior à frequência de Nyquist, a fim de limitar componentes espectrais indesejados.
III. Para sinais de baixa amplitude, realizar a digitalização diretamente no ADC, sem amplificação prévia, reduz o erro de quantização.
É correto o que se apresenta em:
I. Sensores indutivos detectam materiais metálicos, pois operam pela alteração do campo eletromagnético gerado pelo próprio sensor.
II. Sensores capacitivos podem detectar líquidos, pós e materiais orgânicos, devido à variação da constante dielétrica do meio.
III. Chaves magnéticas do tipo reed switch realizam a comutação sem contato mecânico direto entre partes móveis.
É correto o que se apresenta em:
ẋ = Ax + Bu
em que x é o vetor de estados, u é o vetor de entradas e A e B são as matrizes do modelo em espaço de estados.
Neste problema de controle ótimo, minimiza-se o funcional
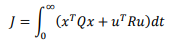
em que Q e R são matrizes de ponderação, a fim de obter a matriz de ganhos K da lei de controle por realimentação completa de estados u = −Kx.
A solução passa pela obtenção de uma matriz S, solução de uma equação de Riccati, extraída da formulação do problema.
Analise os itens a seguir relacionados à solução do problema de controle do regulador ótimo quadrático:
I. O ganho K é igual a R −1B TS. II. As matrizes Q, R e S devem ser positivas semidefinidas. III. O sistema em malha fechada é estável se o par (A,B) for controlável.
Está correto o que se afirma em
Se a variável a for verdadeira por 12s seguidos e falsa, caso contrário, a duração total na qual a expressão “3s/a/7s” será verdadeira, em segundos, será
A corrente de armadura quando a velocidade é 1500 rpm é, em ampères:
Seja uma rede de Petri com os seguintes elementos:
• Conjunto de lugares: P = {p1,p2,p3,p4}
• Conjunto de transições: T = {a,b,c,d}
• Pré condições das transições:
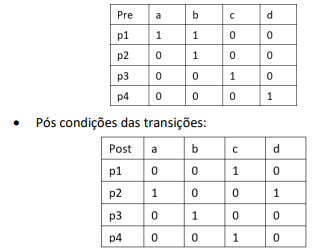
Considere que a rede está com uma marcação inicial p1 = 2, p2 = 0, p3 = 0 e p4 = 0, e disparam-se as transições a, b, c e d, em sequência e nesta ordem.
A marcação final da rede será
A constante de mola, em newtons por centímetros, e a tensão de alimentação do potenciômetro, em volts, devem ser, respectivamente,
Considere o seguinte sistema SISO representado na forma de espaço de estados:
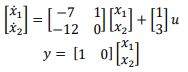
A representação deste mesmo sistema em função de transferência é
Um sistema com equação de estados:
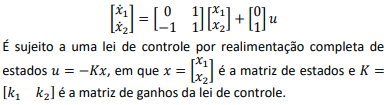
Os valores dos ganhos k1 e k2 para que o sistema em malha fechada tenha polos duplos em −2 são, respectivamente
O valor do ganho integral ki para que o erro em estado estacionário para uma entrada rampa unitária aplicada ao sistema em malha fechada correspondente seja de 0,1 unidades, é