Questões de Concurso
Para engenheiro eletrônico
Foram encontradas 1.389 questões
Resolva questões gratuitamente!
Junte-se a mais de 4 milhões de concurseiros!
Dentre as redes a seguir, liste as redes industriais:
1) AS-Interface
2) Modbus
3) Ethernet
4) Profibus
5) Internet
6) DeviceNet
7) Extranet
8) Fieldbus Foundation
9) TCP/IP
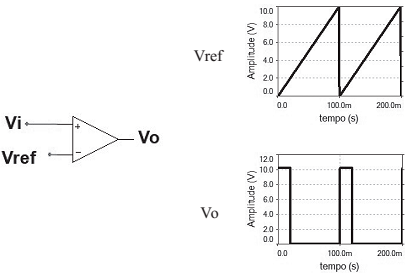
Considerando o circuito gerador de sinal PWM a seguir, determine o valor médio da tensão de saída e os tempos ton (saída máxima) e toff (saída mínima) para um sinal de entrada de 2 V.
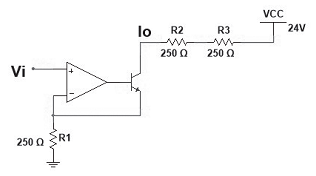
No circuito driver para motor DC apresentado na figura a seguir, determine:
- Os valores de R1 e R2 para que Vi = 0.5 V resulte em Vo = 12 V;
- O menor ganho de corrente dos transistores necessário para que o amplificador operacional funcione com correntes de saída menores do que 5mA.
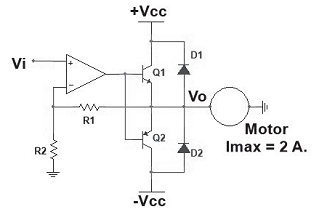
Considerando o amplificador operacional ideal, determine a relação entre a corrente de coletor do transistor (Io) e a tensão de entrada (Vi).
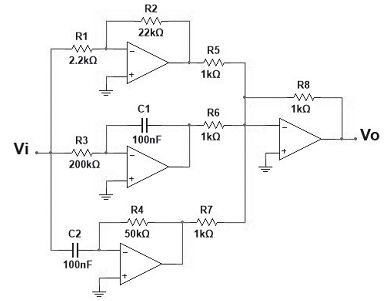
O circuito a seguir corresponde a um controlador PID analógico do tipo paralelo. Determine os valores de Kp, Ti e Td.
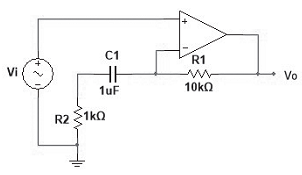
Com relação ao circuito da figura a seguir podemos afirmar que:
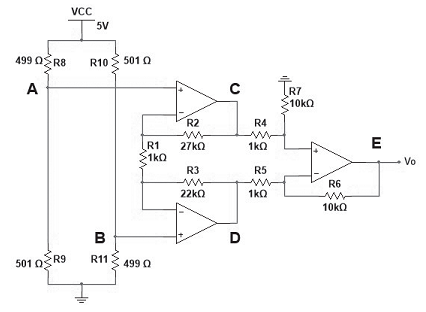
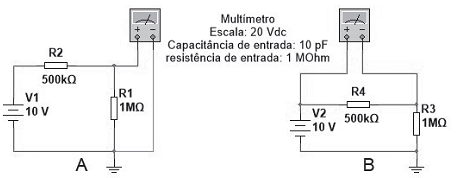
Dado o circuito abaixo, foram feitas medidas de tensão sobre os resistores utilizando um multímetro com as características indicadas. Indique os valores encontrados.
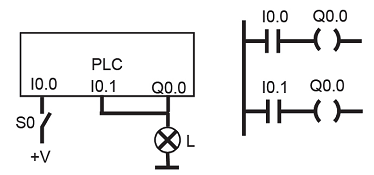
De acordo com o circuito físico e o programa lógico apresentados na figura a seguir,
podemos afirmar que:
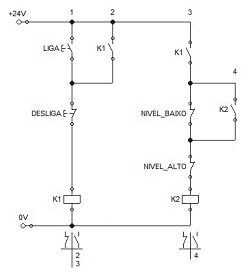
Dado o circuito físico de acionamento de uma bomba d’água, indique os tipos de contatos lógicos a serem utilizados no programa Ladder de um PLC.
É preciso acionar cilindros pneumáticos através de um PLC. Identifique, dentre os componentes listados, aqueles que se relacionam com a tarefa desejada. Considere que já existem os cilindros e o PLC.
1) compressor de ar
2) válvula direcional
3) relé
4) fonte de alimentação elétrica DC
5) contator
6) disjuntor
7) ventosa
8) compressor de óleo
9) cartões digitais de entrada/saída
10) cartões analógicos de entrada/saída
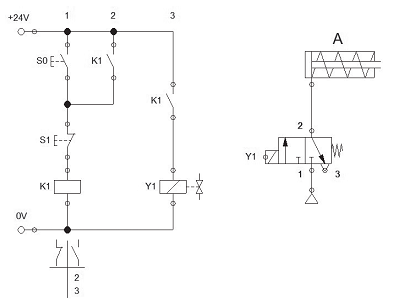
Indique a sequência de eventos que ocorrerão após o acionamento do botão S0.
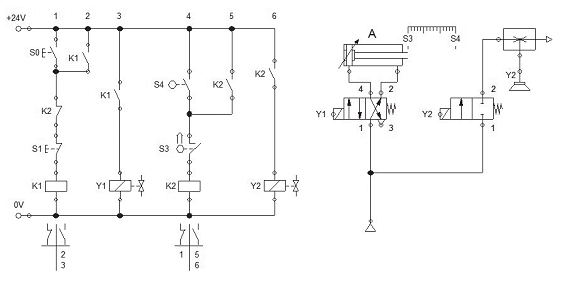
Considerando os diagramas elétrico e pneumático a seguir, podemos afirmar que:
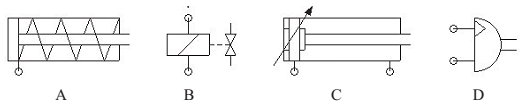
Identifique os dispositivos apresentados na figura a seguir e considere a resposta na seguinte ordem de apresentação: A, B, C, D.
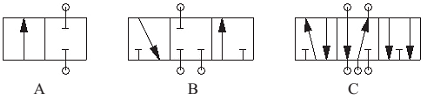
Identifique os tipos de válvulas direcionais apresentadas na figura a seguir de acordo com o número de Vias e de Posições (V/P).