Selecionar segmento
Estude com questões de diferentes segmentos
Atenção: Isso limpará todos os campos já preenchidos no filtro!
Foram encontradas 8.107 questões
Resolva questões gratuitamente!
Junte-se a mais de 4 milhões de concurseiros!
Ano: 2010
Banca:
FGV
Órgão:
FIOCRUZ
Prova:
FGV - 2010 - FIOCRUZ - Tecnologista em Saúde - Experimentação Animal |
Q569069
Veterinária
Levando em consideração a faixa de peso médio de um
lagomorfo e o volume sanguíneo total, assinale a alternativa
que melhor representa variação, mínima e máxima, do
volume de amostra de sangue que pode ser colhido sem
causar transtornos ao animal.
Ano: 2010
Banca:
FGV
Órgão:
FIOCRUZ
Prova:
FGV - 2010 - FIOCRUZ - Tecnologista em Saúde - Experimentação Animal |
Q569068
Veterinária
Assinale a alternativa que indica o tipo de coelho que pode
apresentar problemas de ocorrência de necroses na
venipunção auricular.
Ano: 2010
Banca:
FGV
Órgão:
FIOCRUZ
Prova:
FGV - 2010 - FIOCRUZ - Tecnologista em Saúde - Experimentação Animal |
Q569067
Veterinária
Na administração de barbitúrico intraperitoneal em ratos,
assinale a alternativa que indica o local de eleição e a
posição mais segura.
Ano: 2010
Banca:
FGV
Órgão:
FIOCRUZ
Prova:
FGV - 2010 - FIOCRUZ - Tecnologista em Saúde - Experimentação Animal |
Q569066
Veterinária
Os sítios de eleição para a venopunção em ratos e
camundongos são:
Ano: 2010
Banca:
FGV
Órgão:
FIOCRUZ
Prova:
FGV - 2010 - FIOCRUZ - Tecnologista em Saúde - Experimentação Animal |
Q569065
Veterinária
O local adequado para a tuberculinização de macacos é:
Ano: 2010
Banca:
FGV
Órgão:
FIOCRUZ
Prova:
FGV - 2010 - FIOCRUZ - Tecnologista em Saúde - Experimentação Animal |
Q569064
Veterinária
Sobre as boas técnicas de contenção de Lagomorfos,
analise as afirmativas a seguir.
I. O controle e a vigilância nos membros pélvicos evita arranhões no manipulador.
II. O decúbito lateral é bem tolerado pela espécie.
III. A contenção auricular e pela prega cervical podem ser utilizadas indistintamente.
Assinale:
I. O controle e a vigilância nos membros pélvicos evita arranhões no manipulador.
II. O decúbito lateral é bem tolerado pela espécie.
III. A contenção auricular e pela prega cervical podem ser utilizadas indistintamente.
Assinale:
Ano: 2010
Banca:
FGV
Órgão:
FIOCRUZ
Prova:
FGV - 2010 - FIOCRUZ - Tecnologista em Saúde - Experimentação Animal |
Q569063
Veterinária
Os locais usuais de coleta de sangue para análise
laboratorial em lagomorfos e primatas não humanos estão
relacionados a seguir, à exceção de um. Assinale-o.
Ano: 2010
Banca:
FGV
Órgão:
FIOCRUZ
Prova:
FGV - 2010 - FIOCRUZ - Tecnologista em Saúde - Experimentação Animal |
Q569061
Veterinária
Em relação à Lei 6.638, de 8 de maio de 1979, analise as
afirmativas a seguir.
I. O artigo primeiro permite a vivissecção em todo o território nacional.
II. O artigo terceiro impede a vivissecção sem o emprego de anestesia.
III. O artigo quarto prevê que os animais só podem ser submetidos a intervenções dos protocolos quando durante, ou após a vivissecção, receberem cuidados especiais.
Assinale:
I. O artigo primeiro permite a vivissecção em todo o território nacional.
II. O artigo terceiro impede a vivissecção sem o emprego de anestesia.
III. O artigo quarto prevê que os animais só podem ser submetidos a intervenções dos protocolos quando durante, ou após a vivissecção, receberem cuidados especiais.
Assinale:
Ano: 2010
Banca:
FGV
Órgão:
FIOCRUZ
Prova:
FGV - 2010 - FIOCRUZ - Tecnologista em Saúde - Experimentação Animal |
Q569059
Veterinária
Em relação aos princípios éticos e práticos envolvendo
animais, analise as afirmativas a seguir.
I. Realizar várias técnicas cirúrgicas em um mesmo animal é um experimento condenável.
II. Privar o animal de água e alimento é aceitável mesmo por um período prolongado.
III. Provocação de queimaduras é um experimento condenável.
Assinale:
I. Realizar várias técnicas cirúrgicas em um mesmo animal é um experimento condenável.
II. Privar o animal de água e alimento é aceitável mesmo por um período prolongado.
III. Provocação de queimaduras é um experimento condenável.
Assinale:
Ano: 2010
Banca:
FGV
Órgão:
FIOCRUZ
Prova:
FGV - 2010 - FIOCRUZ - Tecnologista em Saúde - Experimentação Animal |
Q569058
Veterinária
Com relação às competências do Conselho Nacional de
Controle de Experimentação Animal (CONCEA), analise as
afirmativas a seguir.
I. expedir e fazer cumprir normas relativas à utilização humanitária de animais com finalidade de ensino e pesquisa científica.
II. credenciar instituições para criação ou utilização de animais em ensino e pesquisa científica.
III. estabelecer e rever normas para credenciamento de instituições que criem ou utilizem animais para ensino e pesquisa.
Assinale:
I. expedir e fazer cumprir normas relativas à utilização humanitária de animais com finalidade de ensino e pesquisa científica.
II. credenciar instituições para criação ou utilização de animais em ensino e pesquisa científica.
III. estabelecer e rever normas para credenciamento de instituições que criem ou utilizem animais para ensino e pesquisa.
Assinale:
Ano: 2010
Banca:
FGV
Órgão:
FIOCRUZ
Prova:
FGV - 2010 - FIOCRUZ - Tecnologista em Saúde - Experimentação Animal |
Q569056
Meio Ambiente
A Toxoplasmose pode ser identificada em primatas não
humanos com os seguintes sintomas:
Ano: 2010
Banca:
FGV
Órgão:
FIOCRUZ
Prova:
FGV - 2010 - FIOCRUZ - Tecnologista em Saúde - Engenharia Eletrônica |
Q569041
Engenharia Eletrônica
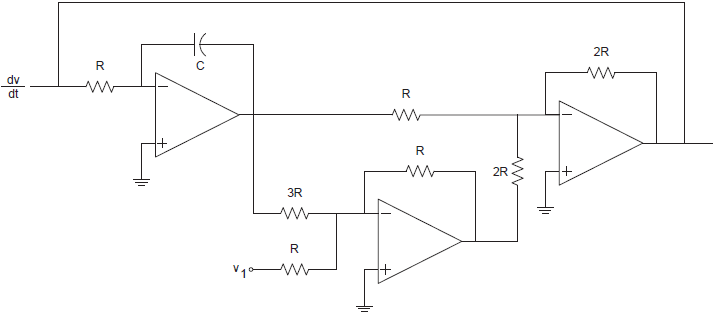
Considerando RC = 1, a equação matemática implementada pelo computador analógico da figura acima é:
Ano: 2010
Banca:
FGV
Órgão:
FIOCRUZ
Prova:
FGV - 2010 - FIOCRUZ - Tecnologista em Saúde - Engenharia Eletrônica |
Q569040
Engenharia Eletrônica
Texto associado
O uso de controladores lógico programáveis na automação industrial é amplo e diversificado. Para a programação e análise destes controladores, a representação gráfica do comportamento dos comandos aplicados às máquinas e aos equipamentos industriais mais complexos é indispensável. Neste contexto, o Grafcet se destaca, empregando uma simbologia com etapas, transições, ações e receptividade das variáveis de entrada e saída. Há padrões definidos para construção utilizando o Grafcet que devem ser seguidos para padronização e lógica da representação feita.
Na figura, as etapas são caracterizadas pela letra A, as transições pela letra f e as ações pela letra M.

Na figura, as etapas são caracterizadas pela letra A, as transições pela letra f e as ações pela letra M.
Das sequências de comandos em Grafcet aqui apresentadas, estão corretamente construídas apenas a(s) que compõe(m) o diagrama(s):
Ano: 2010
Banca:
FGV
Órgão:
FIOCRUZ
Prova:
FGV - 2010 - FIOCRUZ - Tecnologista em Saúde - Engenharia Eletrônica |
Q569039
Engenharia Eletrônica
Texto associado
Uma planta industrial é composta por dois equipamentos que possuem modelos lineares ideais G1(s) e G2(s).
A montagem é feita de forma que a saída de G1(s) é a entrada de G2(s), conforme ilustra a figura.

Para as funções de transferências definidas por afirma-se:
afirma-se:
I. Para uma entrada R(s) limitada, a saída Y(s) também é limitada (BIBO estabilidade)
PORQUE
II. O produto de G1(s) por G2(s) resulta em uma função de transferência estável.
A montagem é feita de forma que a saída de G1(s) é a entrada de G2(s), conforme ilustra a figura.
Para as funções de transferências definidas por
afirma-se:I. Para uma entrada R(s) limitada, a saída Y(s) também é limitada (BIBO estabilidade)
PORQUE
II. O produto de G1(s) por G2(s) resulta em uma função de transferência estável.
Assinale:
Ano: 2010
Banca:
FGV
Órgão:
FIOCRUZ
Prova:
FGV - 2010 - FIOCRUZ - Tecnologista em Saúde - Engenharia Eletrônica |
Q569038
Engenharia Eletrônica
Texto associado
Para uma representação discreta (ou a tempo discreto) no espaço de estados, um sistema linear S1 é definido por x(1+ k ) = Ax(k) + Bu(k) e y(k) = Cx(k) + Du(k) , em que: o vetor de estado x∈ ; o vetor de saída y∈
; o vetor de saída y∈ ; o vetor de entrada u∈
; o vetor de entrada u∈ ; k ∈
; k ∈ (incremento discreto); as matrizes são invariantes no tempo, têm dimensões compatíveis com os vetores e são formadas por números reais.
(incremento discreto); as matrizes são invariantes no tempo, têm dimensões compatíveis com os vetores e são formadas por números reais.
Por meio de uma transformada de similaridade de S1, obtida utilizando uma matriz T∈ n×n | ∃T−1 , define-se o sistema S2.
n×n | ∃T−1 , define-se o sistema S2.
; o vetor de saída y∈ ; o vetor de entrada u∈; k ∈ (incremento discreto); as matrizes são invariantes no tempo, têm dimensões compatíveis com os vetores e são formadas por números reais.Por meio de uma transformada de similaridade de S1, obtida utilizando uma matriz T∈
n×n | ∃T−1 , define-se o sistema S2.
Empregando as denominações de matriz de dinâmica (A ), matriz de entradas (B ), matriz de saída (C) e matriz de transmissão direta (D), para T ≠ I (a matriz de transformação não é a matriz identidade), ao se comparar as propriedades, as matrizes e os vetores dos dois sistemas, verifica-se que:
Ano: 2010
Banca:
FGV
Órgão:
FIOCRUZ
Prova:
FGV - 2010 - FIOCRUZ - Tecnologista em Saúde - Engenharia Eletrônica |
Q569037
Engenharia Eletrônica
Texto associado

Os Controladores Lógicos Programáveis (CLPs) substituíram elementos e componentes eletro-eletrônicos de acionamento e são fundamentais na automação moderna. Como uma linguagem de programação similar à de diagramas lógicos de acionamento, desenvolvidos por eletrotécnicos e profissionais da área de controle, os CLPs são empregados em larga escala na indústria.
A figura a seguir apresenta, em condições ideais de funcionamento, uma programação em linguagem de contatos (ou LADDER) em que o contato normalmente aberto B é energizado por uma botoeira (por cerca de um segundo) e os contatos definidos como D estão associados a uma chave.
No esquema: T0 e T1 são temporizadores e estão associados aos tempos de t1 s e t2 s, com t2 > t1; e M0, M1 e M2 são motores. O contato D está desligado e só é acionado após os três motores estarem em funcionamento.
A figura a seguir apresenta, em condições ideais de funcionamento, uma programação em linguagem de contatos (ou LADDER) em que o contato normalmente aberto B é energizado por uma botoeira (por cerca de um segundo) e os contatos definidos como D estão associados a uma chave.
No esquema: T0 e T1 são temporizadores e estão associados aos tempos de t1 s e t2 s, com t2 > t1; e M0, M1 e M2 são motores. O contato D está desligado e só é acionado após os três motores estarem em funcionamento.
Desta forma, pode-se afirmar que:
Ano: 2010
Banca:
FGV
Órgão:
FIOCRUZ
Prova:
FGV - 2010 - FIOCRUZ - Tecnologista em Saúde - Engenharia Eletrônica |
Q569036
Engenharia Eletrônica
Texto associado
No processo de automação industrial, alguns fatores e componentes merecem destacada consideração e análise. Em particular, os acionadores para motores de indução a corrente alternada (CA), por controlar as variáveis elétricas – tensão e corrente – nos enrolamentos do estator do motor, permitem o controle desses motores de forma a obter o desempenho desejado (supondo que o comportamento é viável tecnicamente), com ajuste de torque, velocidade e/ou posição.
Os acionadores funcionam baseados na variação da tensão, corrente, frequência ou de uma combinação destas.
Os acionadores funcionam baseados na variação da tensão, corrente, frequência ou de uma combinação destas.
Em relação aos tipos de acionadores, suas características e empregos, assinale a afirmativa correta.
Ano: 2010
Banca:
FGV
Órgão:
FIOCRUZ
Prova:
FGV - 2010 - FIOCRUZ - Tecnologista em Saúde - Engenharia Eletrônica |
Q569035
Engenharia Eletrônica
Texto associado
ENTITY entidade IS
PORT (a, b, c: IN bit;
d, e: OUT bit);
END entidade;
ARCHITECTURE arquitetura OF entidade IS
BEGIN
PROCESS (a, b, c)
BEGIN
IF (c = '1') THEN
d <= a XOR b;
e <= a AND b;
ELSE
d <= '0';
e <= '0';
END PROCESS;
END arquitetura;
PORT (a, b, c: IN bit;
d, e: OUT bit);
END entidade;
ARCHITECTURE arquitetura OF entidade IS
BEGIN
PROCESS (a, b, c)
BEGIN
IF (c = '1') THEN
d <= a XOR b;
e <= a AND b;
ELSE
d <= '0';
e <= '0';
END PROCESS;
END arquitetura;
O código VHDL mostrado acima descreve a seguinte operação lógica:
Ano: 2010
Banca:
FGV
Órgão:
FIOCRUZ
Prova:
FGV - 2010 - FIOCRUZ - Tecnologista em Saúde - Engenharia Eletrônica |
Q569034
Engenharia Eletrônica
Texto associado
Para representações em espaço de estado algumas propriedades são importantes e definem as possibilidades de manipulação de uma planta física. A controlabilidade e a observabilidade de um sistema são duas das propriedades fundamentais para a síntese de controladores.
Para o sistema linear contínuo (t ) = Ax(t) + Bu(t) e y(t) = Cx(t) + Du(t) , definido pelas matrizes:
(t ) = Ax(t) + Bu(t) e y(t) = Cx(t) + Du(t) , definido pelas matrizes:
A = ; B =
; B =  ; C = [ f g]; D = 0 ; e {a,b, c, d, f , g}∈
; C = [ f g]; D = 0 ; e {a,b, c, d, f , g}∈ .
.
Para o sistema linear contínuo
(t ) = Ax(t) + Bu(t) e y(t) = Cx(t) + Du(t) , definido pelas matrizes: A =
; B = ; C = [ f g]; D = 0 ; e {a,b, c, d, f , g}∈.
Assinale a afirmativa correta:
Ano: 2010
Banca:
FGV
Órgão:
FIOCRUZ
Prova:
FGV - 2010 - FIOCRUZ - Tecnologista em Saúde - Engenharia Eletrônica |
Q569033
Engenharia Eletrônica
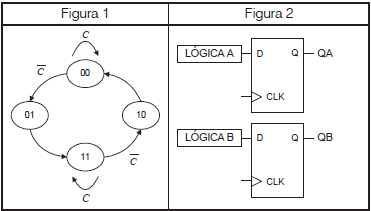
A Figura 1, acima, mostra um diagrama de quatro estados definidos pelos bits B e A, sendo B o mais significativo, e pelo bit de controle C.
A Figura 2, por sua vez, mostra uma implementação síncrona desse diagrama de estados com o uso de flip-flops D e das lógicas A e B.
Estas lógicas devem ser, respectivamente: