Foram encontradas 2.636 questões
Resolva questões gratuitamente!
Junte-se a mais de 4 milhões de concurseiros!
Considere o sistema abaixo (Figura 8) com retroalimentação unitária:
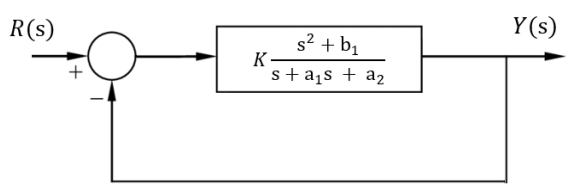
Figura 8
Dado o seu lugar das raízes mostrado na Figura 9 abaixo, assinale a alternativa correta.
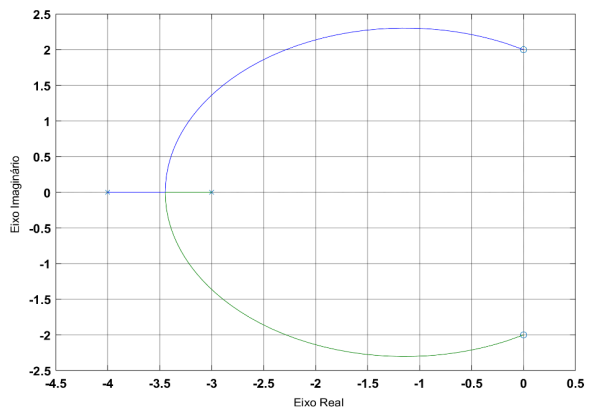
Figura 9
Considere o diagrama de blocos da Figura 7 abaixo:
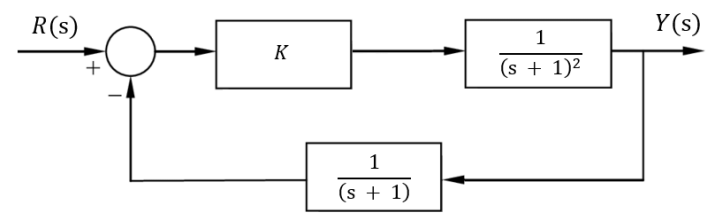
Figura 7
Assinale a alternativa que corresponde ao intervalo de valores de K que garante a estabilidade do
sistema em malha fechada.
Considere o sistema de controle com retroalimentação unitária mostrado na Figura 5 abaixo:
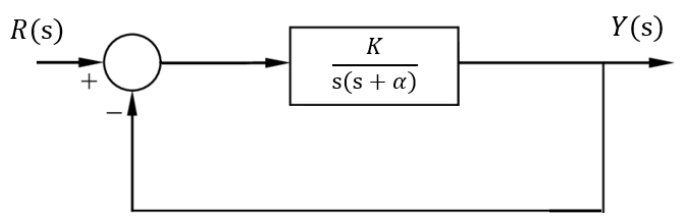
Figura 5
Determine os valores de K e α para os quais a resposta a um degrau unitário é subamortecida
(ζ = 0,5) e apresenta um tempo de 2 segundos para que as oscilações transitórias permaneçam
dentro de uma faixa de 2% em torno do valor final do regime permanente.
I. Os compensadores por atraso de fase ou por avanço de fase são usualmente implementados com estruturas ativas.
II. Os sistemas de controle em malha aberta possuem maior rejeição a perturbações externas do que os sistemas em malha fechada.
III. Há uma melhoria maior no erro de estado estacionário se for usado um controlador Proporcional-Integral (PI) no lugar de um compensador por atraso de fase.
H(s) = ωn2 / s2 + 2ζωns + ωn2
Onde ωn e ζ são denominados de frequência natural e coeficiente de amortecimento, respectivamente. Acerca da natureza da resposta transitória desse sistema, analise as assertivas abaixo e assinale a alternativa correta.
I. O sistema apresenta uma resposta ao degrau unitário subamortecida se 0 < ζ < 1.
II. O sistema apresenta uma resposta ao degrau unitário oscilatória se ζ > 1.
III. Se o sistema possui polos com parte real negativa e iguais, a resposta ao degrau unitário será superamortecida.
G(s) =k / τs + 1
Para isso, ele tem à disposição o diagrama de Bode (Figura 2) abaixo:
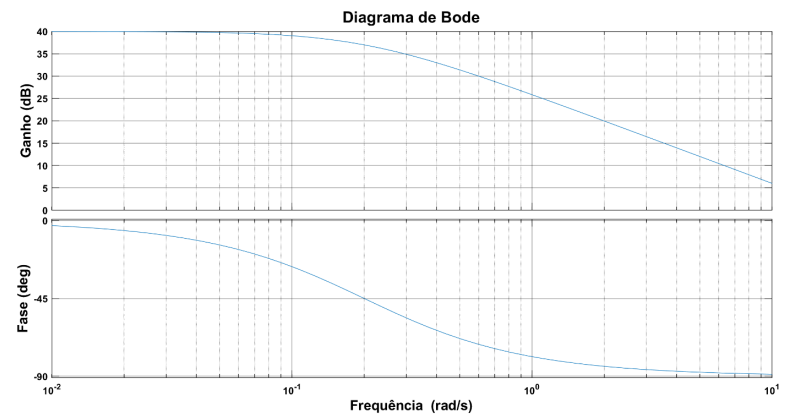
Figura 2
Os valores de τ e K são:
dy(t)/dt + 4y(t) = 3e −t , y(0) = 1
Coluna 1 1. ℒ[a1f1(t) + a2f2(t)] = a1F1(s) + a2F2(s) 2. ℒ[e−atf(t)] = F(s + a) 3. ℒ[f(t − T)] = e−sTF(s) 4. ℒ[f(at)] = ⅟aF(s/a)
Coluna 2 ( ) Teorema do Deslocamento no Tempo.
( ) Teorema do Deslocamento na Frequência.
( ) Teorema do Fator de Escala.
( ) Teorema da Linearidade.
A ordem correta de preenchimento dos parênteses, de cima para baixo, é:
• Resistência de 10 Ω. • Indutância de 250 mH. • Capacitância de 25 µF. • Frequência de 60 Hz. • Tensão de 220 V (valor eficaz).
Considerando esse circuito, qual o valor para XL e XC, respectivamente?
Coluna 1 1. TN-S. 2. TN-C. 3. TN-C-S. 4. TT. 5. IT.
Coluna 2 ( ) O condutor neutro é aterrado independente do aterramento das massas.
( ) As funções de neutro e de condutor de proteção são combinadas num único condutor ao longo de toda a instalação.
( ) Não existe nenhum ponto de alimentação diretamente aterrado, estando aterradas as massas da instalação.
( ) Condutor neutro e condutor de proteção separados ao longo de toda instalação.
( ) As funções do condutor neutro e do condutor de proteção são combinadas em uma parte da instalação.
A ordem correta de preenchimento dos parênteses, de cima para baixo, é:
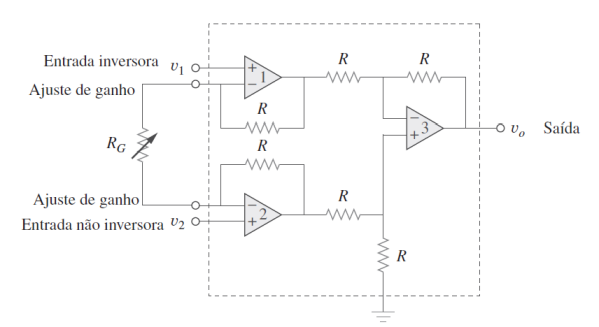
Figura 3
Considere que vo = 2,005 V, v2 = 2,013 e R = 8 kΩ. Se RG for ajustado para 250 Ω, os valores para o ganho de tensão (Av) e a tensão de saída (vo) são:
( ) O ruído térmico é gerado pela agitação térmica dos elétrons em um condutor.
( ) O ruído burst é causado pelas oscilações aleatórias do movimento dos portadores de carga em um condutor.
( ) O ruído avalanche aparece quando a junção pn é operada no modo de condução reversa.
( ) O ruído shot está relacionado com as imperfeições nos materiais semicondutores e nas implantações de íons pesados.
A ordem correta de preenchimento dos parênteses, de cima para baixo, é:
i = – 5 cos(ωt – 50°) v = 10 sen(ωt – 140°)
A relação de fase entre as formas de onda senoidais i e v é:
Um sinal x(t) ocupa uma frequência máxima de fmax = 18 KHz. Esse sinal é digitalizado, aplicando uma frequência de amostragem de fs. Desconsidere o efeito de erro de quantização nessa conversão. No domínio digital, esse sinal passa por um filtro cuja resposta ao impulso é dada por h[n] = (1/2)2 u[n]. Em seguida, o sinal é reconstruído em tempo contínuo, aplicando a mesma frequência de amostragem fs inicial. Considere um filtro de reconstrução ideal.
Considerando as informações apresentadas, assinale a alternativa correta.