Questões de Concurso
Foram encontradas 491 questões
Resolva questões gratuitamente!
Junte-se a mais de 4 milhões de concurseiros!
I. Os sensores indutivos e os sensores capacitivos discretos têm em comum a presença de um circuito oscilador.
II. No sensor ótico de barreira, o emissor e o receptor são montados no mesmo invólucro.
III. Devido à natureza do sinal emitido, um sensor ultrassônico não detecta superfícies metálicas.
Qual(is) está(ão) corretas?
Nessas condições, verifica-se que existe uma
Uma técnica que NÃO se aplica a essa aproximação é a(o)
Considere A uma matriz quadrada ortogonal qualquer não nula.
Com relação a essa matriz, observa-se que
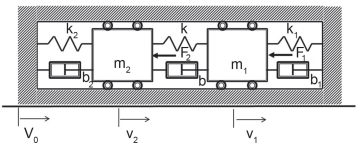
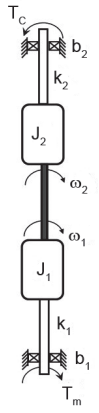
A matriz de amortecimento desse sistema é dada por
yi+1 = yi + h f(xi , yi )
Essa fórmula de recorrência descreve um método numérico para solução computacional de equações diferenciais.
Tal método é o de
Considere que dois elementos dinâmicos são acoplados com transferência de potência entre eles.
O efeito descrito acima é o de
Considere a função de transferência de malha aberta na qual |z|>|p|
k(s + z) / s(s + p)(s2 + 2ps + p2 + 2p)
Considere a construção de uma malha fechada com esse sistema no seu ramo direto e realimentação unitária, e que k1 e k3 são ganhos para os quais a malha fechada possui polos reais iguais, e k2 é o ganho no qual a malha fechada passa a ser instável.
Considerando-se k1
< k2
< k3
, conclui-se que modos superamortecidos estarão presentes na resposta dinâmica
estável dessa malha fechada para
O sistema de malha fechada descrito acima é
Considere o Lugar Geométrico das Raizes (LGR) da Figura abaixo.

Considerando-se as informações acima, verifica-se que
K = 3 é o ganho
Uma das possíveis inconsistências que devem ser evitadas são as malhas