Questões de Concurso
Foram encontradas 491 questões
Resolva questões gratuitamente!
Junte-se a mais de 4 milhões de concurseiros!
Qual dos sensores é mais adequado para medir a posição angular de uma junta rotativa em um sistema de controle de posicionamento de um robô industrial?
Um robô industrial é uma máquina programável de propósito geral que possui certas características antropomórficas, sendo o braço mecânico (ou manipulador) a característica antropomórfica mais óbvia. O manipulador, combinado com um controlador de alto nível, permite que um robô industrial realize várias tarefas como carregamento e descarregamento de máquinas e equipamentos, processo de soldagem e pintura pulverizada.
Em relação aos robôs industriais, pode-se afirmar
que:
O diagrama de blocos a seguir representa uma planta de um motor de corrente contínua. Deseja-se
incluir um controlador que, ao adicionar um ganho, garante a estabilidade do sistema em malha fechada.
Determine a faixa de valores de ganho K, para que o sistema realimentado seja estável.
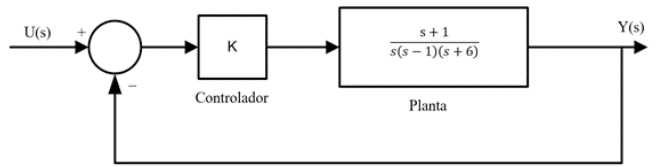
Fonte: IFSP, 2024
Um engenheiro de automação está desenvolvendo um sistema de controle para ajustar a temperatura de um forno industrial. Devido à complexidade das variações térmicas e às incertezas do processo, foi decidido utilizar um controlador fuzzy para otimizar o desempenho do sistema. Além disso, o engenheiro quer integrar técnicas de aprendizado de máquina para que o controlador possa se adaptar dinamicamente às condições do forno.
Com base nessa situação, qual das opções abaixo descreve corretamente uma vantagem da utilização de um controlador fuzzy adaptativo em comparação a um controlador fuzzy clássico?
I. Suporta a topologia de ligação em estrela. II. Suporta a topologia de ligação em barramento. III. Suporta a topologia de ligação ponto a ponto. IV. Pode ser utilizado com o modelo de comunicação mestre-escravo. V. Pode ser utilizado com o modelo de comunicação de passagem de token (token passing).
Quais estão corretas?
I. Sensores indutivos são sensores de proximidade. II. Sensores capacitivos são sensores de proximidade. III. Sensores de proximidade indutivos detectam alvos não metálicos. IV. Microchaves são sensores discretos e de proximidade. V. Sensores de proximidade permitem a operação sem contato mecânico.
Quais estão corretas?
Assinale a alternativa que preenche, correta e respectivamente, as lacunas do trecho acima.