Questões da Prova CESGRANRIO - 2011 - Transpetro - Engenheiro Júnior - Automação
Foram encontradas 67 questões
Resolva questões gratuitamente!
Junte-se a mais de 4 milhões de concurseiros!
Ano: 2011
Banca:
CESGRANRIO
Órgão:
Transpetro
Prova:
CESGRANRIO - 2011 - Transpetro - Engenheiro Júnior - Automação |
Q192347
Engenharia de Automação
Costuma-se aproximar a variável complexa z, usada em sistemas discretos (digitais), pela variável também complexa w para sistemas contínuos, através da relação de transformação  onde T (real positivo) é o período de amostragem usado na discretização do sinal contínuo.
onde T (real positivo) é o período de amostragem usado na discretização do sinal contínuo.
Sabe-se que a região de estabilidade para sistemas contínuos é o SPE, ou seja, o Semiplano da Esquerda do plano complexo da variável w, que pode ser definida por Re[w] < 0.
O lugar geométrico, no plano da variável z, dos pontos em que Re[w] < 0, é a região interior ao círculo de raio igual a (A) 1 e centro na origem
onde T (real positivo) é o período de amostragem usado na discretização do sinal contínuo.Sabe-se que a região de estabilidade para sistemas contínuos é o SPE, ou seja, o Semiplano da Esquerda do plano complexo da variável w, que pode ser definida por Re[w] < 0.
O lugar geométrico, no plano da variável z, dos pontos em que Re[w] < 0, é a região interior ao círculo de raio igual a (A) 1 e centro na origem
Ano: 2011
Banca:
CESGRANRIO
Órgão:
Transpetro
Prova:
CESGRANRIO - 2011 - Transpetro - Engenheiro Júnior - Automação |
Q192346
Engenharia de Automação
A famosa sequência de Fibonacci pode ser definida como o sinal x(n), discreto, causal e infinito, cujas primeiras amostras são

A sua lei de formação para pode ser expressa como
pode ser expressa como 
Aplicando a Transformada Z no sinal x(n), resulta a expressão
A sua lei de formação para
pode ser expressa como Aplicando a Transformada Z no sinal x(n), resulta a expressão
Ano: 2011
Banca:
CESGRANRIO
Órgão:
Transpetro
Prova:
CESGRANRIO - 2011 - Transpetro - Engenheiro Júnior - Automação |
Q192345
Matemática
O determinante da matriz 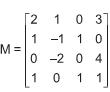 é
é
é
Ano: 2011
Banca:
CESGRANRIO
Órgão:
Transpetro
Prova:
CESGRANRIO - 2011 - Transpetro - Engenheiro Júnior - Automação |
Q192344
Engenharia de Automação
Um sistema linear é representado em Espaço de Estados pelas equações:

Os polos desse sistema são
Os polos desse sistema são
Ano: 2011
Banca:
CESGRANRIO
Órgão:
Transpetro
Prova:
CESGRANRIO - 2011 - Transpetro - Engenheiro Júnior - Automação |
Q192343
Engenharia de Automação
Considere que x(t) é um sinal que evolui no domínio do tempo de acordo com a equação diferencial linear representada por 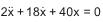 , onde
, onde 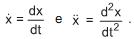 . Considerando
. Considerando 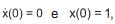 e , a solução dessa equação, válida unicamente para t > 0, é expressa por
e , a solução dessa equação, válida unicamente para t > 0, é expressa por
, onde . Considerando e , a solução dessa equação, válida unicamente para t > 0, é expressa por