Questões de Concurso Comentadas por alunos sobre robótica e automação em engenharia de automação
Foram encontradas 30 questões
Resolva questões gratuitamente!
Junte-se a mais de 4 milhões de concurseiros!
Ano: 2015
Banca:
IF-RS
Órgão:
IF-RS
Prova:
IF-RS - 2015 - IF-RS - Professor - Automação e Controle |
Q541194
Engenharia de Automação
Texto associado
Em relação às afirmativas abaixo, marque a alternativa correta:
I. Um robô com mais de seis graus de liberdade é intrinsecamente redundante, no que tange ao posicionamento com destreza do efetuador final no espaço 3D.
II. Robôs de cadeia fechada e paralelos são inerentemente redundantes.
III. Os manipuladores cinematicamente redundantes permitem infinitas soluções dasua cinemática inversa para uma postura particular do efetuador final.
IV. A redundância é um conceito relativo à tarefa definida para o manipulador final, ou seja, o mesmo manipulador pode ser redundante para determinada tarefa e não redundante para outra.
Assinale a alternativa em que toda(s) a(s) afirmativa(s) está(ão) CORRETA(S):
Ano: 2015
Banca:
IF-RS
Órgão:
IF-RS
Prova:
IF-RS - 2015 - IF-RS - Professor - Automação e Controle |
Q541192
Engenharia de Automação
Em relação às afirmativas abaixo sobre a definição de graus de liberdade de um manipulador.
I. Número de variáveis independentes necessárias para especificar completamente a configuração de uma cadeia cinemática em relação a uma referência.
II. Dimensão do espaço de configuração de um manipulador.
III. Número de juntas de um manipulador, serial ou paralelo.
Assinale a alternativa em que toda(s) a(s) afirmativa(s) está(ão) CORRETA(S):
I. Número de variáveis independentes necessárias para especificar completamente a configuração de uma cadeia cinemática em relação a uma referência.
II. Dimensão do espaço de configuração de um manipulador.
III. Número de juntas de um manipulador, serial ou paralelo.
Assinale a alternativa em que toda(s) a(s) afirmativa(s) está(ão) CORRETA(S):
Ano: 2015
Banca:
IF-RS
Órgão:
IF-RS
Prova:
IF-RS - 2015 - IF-RS - Professor - Automação e Controle |
Q541191
Engenharia de Automação
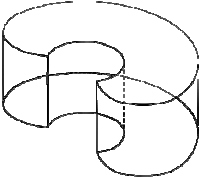
O robô manipulador que apresenta o volume de trabalho característico mostrado na figura abaixo pode ser cinematicamente classificado como:
Ano: 2012
Banca:
CESGRANRIO
Órgão:
Transpetro
Prova:
CESGRANRIO - 2012 - Transpetro - Engenheiro Júnior - Automação |
Q262952
Engenharia de Automação
Um projeto de automação utiliza um sistema hidráulico que opera com resfriamento de água. A água circula através de uma bomba que a retira de um poço, à razão de 7,5 litros por segundo. O engenheiro identificou que o poço possui 10 metros de profundidade e que o rendimento da bomba é de 80%.
A potência mecânica, em HP, necessária e suficiente ao sistema hidráulico, atendendo às condições dadas, é
A potência mecânica, em HP, necessária e suficiente ao sistema hidráulico, atendendo às condições dadas, é
Q262804
Engenharia de Automação
Para simplificar o problema de transmissão de dados, as redes de computadores são estruturadas em camadas, as quais se encarregam de funções específicas.
No modelo de referência OSI, a camada que realiza controle de acesso ao meio é
No modelo de referência OSI, a camada que realiza controle de acesso ao meio é