Questões da Prova CESPE - 2010 - ABIN - Oficial Técnico de Inteligência – Área de Engenharia Elétrica
Foram encontradas 16 questões
Resolva questões gratuitamente!
Junte-se a mais de 4 milhões de concurseiros!
Ano: 2010
Banca:
CESPE / CEBRASPE
Órgão:
ABIN
Prova:
CESPE - 2010 - ABIN - Oficial Técnico de Inteligência – Área de Engenharia Elétrica |
Q184706
Engenharia Eletrônica
Texto associado

O circuito acima representa uma porta lógica digital
implementada com a tecnologia NMOS. Os transistores de
chaveamento (com entradas ) são idênticos e do tipo
) são idênticos e do tipo
enriquecimento, mas o transistor de carga é do tipo depleção. As
tensões de limiar dos transistores de chaveamento e carga são 1 V
e !3 V, respectivamente. Para esse circuito, o nível lógico alto (1
digital) é definido como qualquer tensão analógica compreendida
entre 3,5 V e 5 V, e o nível lógico baixo (0 digital) corresponde às
tensões analógicas entre 0 e 1,8 V. Esse circuito apresenta duas
peculiaridades:
I se pelo menos um dos transistores de chaveamento operar com
entrada em 5 V, a tensão de saída não excederá 0,3 V;
não excederá 0,3 V;
II somente com ambas as entradas simultaneamente no nível
lógico baixo, a saída atinge o nível lógico alto.
Com base nessas informações, julgue os itens subsequentes.
O circuito acima representa uma porta lógica digital
implementada com a tecnologia NMOS. Os transistores de
chaveamento (com entradas
) são idênticos e do tipoenriquecimento, mas o transistor de carga é do tipo depleção. As
tensões de limiar dos transistores de chaveamento e carga são 1 V
e !3 V, respectivamente. Para esse circuito, o nível lógico alto (1
digital) é definido como qualquer tensão analógica compreendida
entre 3,5 V e 5 V, e o nível lógico baixo (0 digital) corresponde às
tensões analógicas entre 0 e 1,8 V. Esse circuito apresenta duas
peculiaridades:
I se pelo menos um dos transistores de chaveamento operar com
entrada em 5 V, a tensão de saída
não excederá 0,3 V;II somente com ambas as entradas simultaneamente no nível
lógico baixo, a saída atinge o nível lógico alto.
Com base nessas informações, julgue os itens subsequentes.
Enquanto ambas as entradas  estiverem fixadas no nível lógico baixo, é possível que haja dissipação apreciável de potência pelo circuito.
estiverem fixadas no nível lógico baixo, é possível que haja dissipação apreciável de potência pelo circuito.
estiverem fixadas no nível lógico baixo, é possível que haja dissipação apreciável de potência pelo circuito.
Ano: 2010
Banca:
CESPE / CEBRASPE
Órgão:
ABIN
Prova:
CESPE - 2010 - ABIN - Oficial Técnico de Inteligência – Área de Engenharia Elétrica |
Q184705
Engenharia Eletrônica
Texto associado
Estima-se, atualmente, que mais de 90% das malhas de controle
utilizadas em processos industriais operem com controladores
proporcional-integral-derivativo (PID). Acerca de controlador PID,
julgue os itens a seguir.
utilizadas em processos industriais operem com controladores
proporcional-integral-derivativo (PID). Acerca de controlador PID,
julgue os itens a seguir.
A função de transferência de um controlador PID pode ser representada por H (s) = K  , em que K é o ganho do controlador,
, em que K é o ganho do controlador,  são as constantes de tempo integral e derivativo, respectivamente, e p é um polo para limitação de ganho em altas frequências.
são as constantes de tempo integral e derivativo, respectivamente, e p é um polo para limitação de ganho em altas frequências.
, em que K é o ganho do controlador, são as constantes de tempo integral e derivativo, respectivamente, e p é um polo para limitação de ganho em altas frequências.
Ano: 2010
Banca:
CESPE / CEBRASPE
Órgão:
ABIN
Prova:
CESPE - 2010 - ABIN - Oficial Técnico de Inteligência – Área de Engenharia Elétrica |
Q184704
Engenharia Eletrônica
Texto associado
Estima-se, atualmente, que mais de 90% das malhas de controle
utilizadas em processos industriais operem com controladores
proporcional-integral-derivativo (PID). Acerca de controlador PID,
julgue os itens a seguir.
utilizadas em processos industriais operem com controladores
proporcional-integral-derivativo (PID). Acerca de controlador PID,
julgue os itens a seguir.
O uso de controlador PID é adequado para eliminar erros de regime permanente (ação derivativa), antecipar o comportamento do processo (ação integral) e reagir ao erro presente, conferindo ao sistema de controle uma reação rápida à ação de perturbações ou variações de referência de magnitudes significativas (ação proporcional).
Ano: 2010
Banca:
CESPE / CEBRASPE
Órgão:
ABIN
Prova:
CESPE - 2010 - ABIN - Oficial Técnico de Inteligência – Área de Engenharia Elétrica |
Q184703
Engenharia Eletrônica
Texto associado
Estima-se, atualmente, que mais de 90% das malhas de controle
utilizadas em processos industriais operem com controladores
proporcional-integral-derivativo (PID). Acerca de controlador PID,
julgue os itens a seguir.
utilizadas em processos industriais operem com controladores
proporcional-integral-derivativo (PID). Acerca de controlador PID,
julgue os itens a seguir.
Uma possível implementação de um controlador PID pode ser corretamente realizada pelo circuito mostrado na figura abaixo, utilizando-se amplificadores operacionais, resistores, potenciômetros e capacitores. O ganho, a constante de tempo integral, a constante de tempo derivativo e o polo para eliminação de ganho em altas frequências são ajustados como  , respectivamente.
, respectivamente.
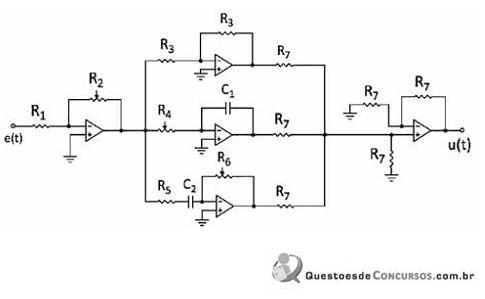
, respectivamente.
Ano: 2010
Banca:
CESPE / CEBRASPE
Órgão:
ABIN
Prova:
CESPE - 2010 - ABIN - Oficial Técnico de Inteligência – Área de Engenharia Elétrica |
Q184702
Engenharia Eletrônica
Texto associado

O diagrama de bloco mostrado na figura acima ilustra a entrada
X(s) e a saída Y(s) de um sistema dinâmico, cuja função de
transferência é H(s). Considere que, à entrada do sistema, seja
aplicado um impulso unitário X(s) = 1, sendo então observada a
resposta Y(s) resultante. Considere, ainda, que a transformada de
Laplace Y(s) do sinal observado nos terminais de saída possua zeros

= –5, e que Y(s) represente uma tensão e Y(2) = 0,5 V.
Com base nessas considerações, julgue os seguintes itens.
O diagrama de bloco mostrado na figura acima ilustra a entrada
X(s) e a saída Y(s) de um sistema dinâmico, cuja função de
transferência é H(s). Considere que, à entrada do sistema, seja
aplicado um impulso unitário X(s) = 1, sendo então observada a
resposta Y(s) resultante. Considere, ainda, que a transformada de
Laplace Y(s) do sinal observado nos terminais de saída possua zeros
= –5, e que Y(s) represente uma tensão e Y(2) = 0,5 V.
Com base nessas considerações, julgue os seguintes itens.
Em regime permanente, a amplitude do sinal de saída é dada por y(t → ∞ ) =  V.
V.
V.