Questões da Prova FGV - 2010 - FIOCRUZ - Tecnologista em Saúde - Engenharia Eletrônica
Foram encontradas 25 questões
Resolva questões gratuitamente!
Junte-se a mais de 4 milhões de concurseiros!
Ano: 2010
Banca:
FGV
Órgão:
FIOCRUZ
Prova:
FGV - 2010 - FIOCRUZ - Tecnologista em Saúde - Engenharia Eletrônica |
Q569041
Engenharia Eletrônica
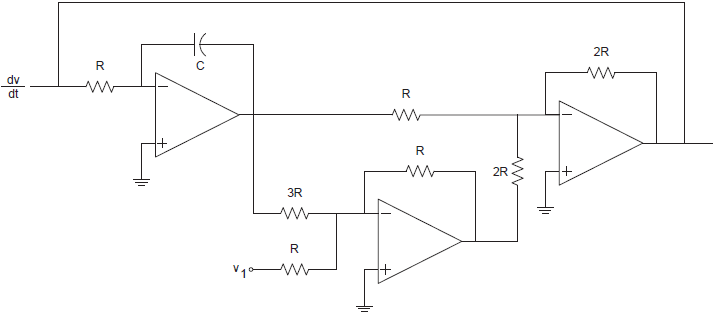
Considerando RC = 1, a equação matemática implementada pelo computador analógico da figura acima é:
Ano: 2010
Banca:
FGV
Órgão:
FIOCRUZ
Prova:
FGV - 2010 - FIOCRUZ - Tecnologista em Saúde - Engenharia Eletrônica |
Q569040
Engenharia Eletrônica
Texto associado
O uso de controladores lógico programáveis na automação industrial é amplo e diversificado. Para a programação e análise destes controladores, a representação gráfica do comportamento dos comandos aplicados às máquinas e aos equipamentos industriais mais complexos é indispensável. Neste contexto, o Grafcet se destaca, empregando uma simbologia com etapas, transições, ações e receptividade das variáveis de entrada e saída. Há padrões definidos para construção utilizando o Grafcet que devem ser seguidos para padronização e lógica da representação feita.
Na figura, as etapas são caracterizadas pela letra A, as transições pela letra f e as ações pela letra M.

Na figura, as etapas são caracterizadas pela letra A, as transições pela letra f e as ações pela letra M.
Das sequências de comandos em Grafcet aqui apresentadas, estão corretamente construídas apenas a(s) que compõe(m) o diagrama(s):
Ano: 2010
Banca:
FGV
Órgão:
FIOCRUZ
Prova:
FGV - 2010 - FIOCRUZ - Tecnologista em Saúde - Engenharia Eletrônica |
Q569039
Engenharia Eletrônica
Texto associado
Uma planta industrial é composta por dois equipamentos que possuem modelos lineares ideais G1(s) e G2(s).
A montagem é feita de forma que a saída de G1(s) é a entrada de G2(s), conforme ilustra a figura.

Para as funções de transferências definidas por afirma-se:
afirma-se:
I. Para uma entrada R(s) limitada, a saída Y(s) também é limitada (BIBO estabilidade)
PORQUE
II. O produto de G1(s) por G2(s) resulta em uma função de transferência estável.
A montagem é feita de forma que a saída de G1(s) é a entrada de G2(s), conforme ilustra a figura.
Para as funções de transferências definidas por
afirma-se:I. Para uma entrada R(s) limitada, a saída Y(s) também é limitada (BIBO estabilidade)
PORQUE
II. O produto de G1(s) por G2(s) resulta em uma função de transferência estável.
Assinale:
Ano: 2010
Banca:
FGV
Órgão:
FIOCRUZ
Prova:
FGV - 2010 - FIOCRUZ - Tecnologista em Saúde - Engenharia Eletrônica |
Q569038
Engenharia Eletrônica
Texto associado
Para uma representação discreta (ou a tempo discreto) no espaço de estados, um sistema linear S1 é definido por x(1+ k ) = Ax(k) + Bu(k) e y(k) = Cx(k) + Du(k) , em que: o vetor de estado x∈ ; o vetor de saída y∈
; o vetor de saída y∈ ; o vetor de entrada u∈
; o vetor de entrada u∈ ; k ∈
; k ∈ (incremento discreto); as matrizes são invariantes no tempo, têm dimensões compatíveis com os vetores e são formadas por números reais.
(incremento discreto); as matrizes são invariantes no tempo, têm dimensões compatíveis com os vetores e são formadas por números reais.
Por meio de uma transformada de similaridade de S1, obtida utilizando uma matriz T∈ n×n | ∃T−1 , define-se o sistema S2.
n×n | ∃T−1 , define-se o sistema S2.
; o vetor de saída y∈ ; o vetor de entrada u∈; k ∈ (incremento discreto); as matrizes são invariantes no tempo, têm dimensões compatíveis com os vetores e são formadas por números reais.Por meio de uma transformada de similaridade de S1, obtida utilizando uma matriz T∈
n×n | ∃T−1 , define-se o sistema S2.
Empregando as denominações de matriz de dinâmica (A ), matriz de entradas (B ), matriz de saída (C) e matriz de transmissão direta (D), para T ≠ I (a matriz de transformação não é a matriz identidade), ao se comparar as propriedades, as matrizes e os vetores dos dois sistemas, verifica-se que:
Ano: 2010
Banca:
FGV
Órgão:
FIOCRUZ
Prova:
FGV - 2010 - FIOCRUZ - Tecnologista em Saúde - Engenharia Eletrônica |
Q569037
Engenharia Eletrônica
Texto associado

Os Controladores Lógicos Programáveis (CLPs) substituíram elementos e componentes eletro-eletrônicos de acionamento e são fundamentais na automação moderna. Como uma linguagem de programação similar à de diagramas lógicos de acionamento, desenvolvidos por eletrotécnicos e profissionais da área de controle, os CLPs são empregados em larga escala na indústria.
A figura a seguir apresenta, em condições ideais de funcionamento, uma programação em linguagem de contatos (ou LADDER) em que o contato normalmente aberto B é energizado por uma botoeira (por cerca de um segundo) e os contatos definidos como D estão associados a uma chave.
No esquema: T0 e T1 são temporizadores e estão associados aos tempos de t1 s e t2 s, com t2 > t1; e M0, M1 e M2 são motores. O contato D está desligado e só é acionado após os três motores estarem em funcionamento.
A figura a seguir apresenta, em condições ideais de funcionamento, uma programação em linguagem de contatos (ou LADDER) em que o contato normalmente aberto B é energizado por uma botoeira (por cerca de um segundo) e os contatos definidos como D estão associados a uma chave.
No esquema: T0 e T1 são temporizadores e estão associados aos tempos de t1 s e t2 s, com t2 > t1; e M0, M1 e M2 são motores. O contato D está desligado e só é acionado após os três motores estarem em funcionamento.
Desta forma, pode-se afirmar que: