Questões de Concurso Público IFC-SC 2026 para Técnico de Laboratório: Automação
Foram encontradas 21 questões
Ano: 2026
Banca:
FUNDATEC
Órgão:
IFC-SC
Prova:
FUNDATEC - 2026 - IFC-SC - Técnico de Laboratório: Automação |
Q4027591
Engenharia de Automação
Durante a montagem de um circuito de comando para acionamento de motor trifásico
com reversão de rotação, o projetista utiliza contatos auxiliares do tipo NF associados aos contatores
de avanço e reverso. Nesse contexto, qual é a principal finalidade desse intertravamento elétrico no
funcionamento do sistema?
Ano: 2026
Banca:
FUNDATEC
Órgão:
IFC-SC
Prova:
FUNDATEC - 2026 - IFC-SC - Técnico de Laboratório: Automação |
Q4027592
Engenharia de Automação
Em uma rotina de ajuste de acionamento eletrônico, um técnico identifica que o
motor de indução comandado por inversor apresenta baixo torque de partida em baixas velocidades,
especialmente sob carga mais pesada. Sabendo que esse problema pode ser compensado por um
ajuste associado à queda de tensão na resistência do estator, assinale a alternativa que indica o
parâmetro responsável por essa compensação.
Ano: 2026
Banca:
FUNDATEC
Órgão:
IFC-SC
Prova:
FUNDATEC - 2026 - IFC-SC - Técnico de Laboratório: Automação |
Q4027593
Engenharia de Automação
Em uma bancada de treinamento de comandos lógicos programáveis, um sistema de
sinalização foi programado para simular duas condições comuns da indústria:
• Uma sirene que deve ser acionada somente após um atraso programado, evitando partidas imediatas.
• Um ventilador que deve continuar operando por alguns segundos após o desligamento do comando, para garantir a exaustão residual do ambiente.
Ao revisar o programa em Ladder, foi necessário distinguir o comportamento dos temporizadores empregados nessas duas etapas. Nesse caso, qual alternativa descreve corretamente a diferença principal entre um temporizador TON e um TOF?
• Uma sirene que deve ser acionada somente após um atraso programado, evitando partidas imediatas.
• Um ventilador que deve continuar operando por alguns segundos após o desligamento do comando, para garantir a exaustão residual do ambiente.
Ao revisar o programa em Ladder, foi necessário distinguir o comportamento dos temporizadores empregados nessas duas etapas. Nesse caso, qual alternativa descreve corretamente a diferença principal entre um temporizador TON e um TOF?
Ano: 2026
Banca:
FUNDATEC
Órgão:
IFC-SC
Prova:
FUNDATEC - 2026 - IFC-SC - Técnico de Laboratório: Automação |
Q4027594
Engenharia de Automação
Em um laboratório de automação, um técnico se depara com um transmissor de
pressão cuja etiqueta de identificação está parcialmente ilegível, restando apenas a informação do
range (0 a 10 bar). Ao conectar o instrumento a uma fonte de alimentação e aplicar a pressão do
processo, o sistema de supervisão acusa um sinal de 12 mA. Sabendo que o protocolo de saída é de
4 a 20 mA, a pressão atual no ponto de medição é de:
Ano: 2026
Banca:
FUNDATEC
Órgão:
IFC-SC
Prova:
FUNDATEC - 2026 - IFC-SC - Técnico de Laboratório: Automação |
Q4027595
Engenharia de Automação
Uma indústria de bebidas está automatizando sua linha de envase e precisa
implementar um sistema de contagem de garrafas de vidro incolor em uma esteira de alta velocidade.
O sensor deve ser capaz de detectar a presença do recipiente sem contato físico, sendo robusto à
transparência do material e capaz de altas taxas de comutação. Considerando as propriedades físicas
do vidro e as tecnologias de sensoriamento, qual dispositivo é o mais indicado?
Ano: 2026
Banca:
FUNDATEC
Órgão:
IFC-SC
Prova:
FUNDATEC - 2026 - IFC-SC - Técnico de Laboratório: Automação |
Q4027598
Engenharia de Automação
Um técnico de automação está realizando a manutenção em uma fonte de
alimentação linear de 24 Vcc que alimenta sensores ultrassônicos. Ao conectar o osciloscópio na saída
da ponte retificadora de onda completa (4 diodos), ele observa um sinal pulsante com frequência de
120 Hz. Para que essa tensão possa alimentar os sensores sem causar erros de leitura, é necessário
conectar um capacitor eletrolítico de alta capacitância em paralelo com a saída da ponte. Nesse
circuito, qual é a função primordial desse componente?
Ano: 2026
Banca:
FUNDATEC
Órgão:
IFC-SC
Prova:
FUNDATEC - 2026 - IFC-SC - Técnico de Laboratório: Automação |
Q4027599
Engenharia de Automação
Durante uma inspeção de rotina em um painel de comando, um técnico de automação
observa que um motor trifásico de 15 CV apresenta um aquecimento acima do normal. Para verificar
se há um desequilíbrio de carga entre as fases ou uma sobrecarga mecânica, o profissional precisa
medir a corrente elétrica em cada condutor de fase enquanto o motor opera em regime pleno.
Considerando que o sistema não pode ser desenergizado ou interrompido para a instalação de
instrumentos em série, qual é o equipamento mais indicado para essa medição?
Ano: 2026
Banca:
FUNDATEC
Órgão:
IFC-SC
Prova:
FUNDATEC - 2026 - IFC-SC - Técnico de Laboratório: Automação |
Q4027601
Engenharia de Automação
Durante a configuração de uma bancada de automação com Controlador Lógico
Programável (CLP), módulo de entradas analógicas e Interface Homem-Máquina (IHM), um técnico
precisa validar algumas afirmações feitas por alunos durante a aula prática. Com base nos conceitos
de arquitetura de CLPs e integração com IHM, analise a sentença abaixo:
Em módulos de entrada analógica de CLPs, sinais contínuos como 0–10 V ou 4–20 mA são convertidos por um conversor A/D em valores numéricos que o processador passa a tratar internamente, muitas vezes em faixas inteiras como 0 a 32767, dependendo da resolução e do fabricante (1ª parte). A IHM pode trocar dados com o CLP por meio de protocolos de comunicação industrial, permitindo ler e também escrever variáveis de memória, desde que isso esteja previsto na configuração do sistema e nas permissões definidas no projeto (2ª parte). O endereçamento de entradas e saídas em CLPs segue um padrão fixo e universal entre fabricantes, de modo que a mesma convenção de memória e notação pode ser aplicada indistintamente a qualquer marca (3ª parte).
Quais partes estão corretas?
Em módulos de entrada analógica de CLPs, sinais contínuos como 0–10 V ou 4–20 mA são convertidos por um conversor A/D em valores numéricos que o processador passa a tratar internamente, muitas vezes em faixas inteiras como 0 a 32767, dependendo da resolução e do fabricante (1ª parte). A IHM pode trocar dados com o CLP por meio de protocolos de comunicação industrial, permitindo ler e também escrever variáveis de memória, desde que isso esteja previsto na configuração do sistema e nas permissões definidas no projeto (2ª parte). O endereçamento de entradas e saídas em CLPs segue um padrão fixo e universal entre fabricantes, de modo que a mesma convenção de memória e notação pode ser aplicada indistintamente a qualquer marca (3ª parte).
Quais partes estão corretas?
Ano: 2026
Banca:
FUNDATEC
Órgão:
IFC-SC
Prova:
FUNDATEC - 2026 - IFC-SC - Técnico de Laboratório: Automação |
Q4027605
Engenharia de Automação
Em muitos processos industriais, a variável controlada (por exemplo, temperatura,
nível ou pressão) pode ser mantida dentro de uma faixa aceitável usando um controlador liga-desliga.
Nesse tipo de controle, o atuador assume apenas dois estados (por exemplo, 0%/100%,
desligado/ligado). Para ajustar o comportamento do ciclo de operação, é comum adotar histerese
(banda diferencial), de modo que o comando mude de estado apenas ao ultrapassar limites distintos
para ligar e desligar. Um tanque possui aquecimento elétrico comandado por um controlador
liga-desliga com histerese para controlar a temperatura. O setpoint é 60 °C e a histerese é de ±2 °C
(banda total de 4 °C), com a seguinte lógica:
• LIGA o aquecedor quando T ≤ 58 °C.
• DESLIGA o aquecedor quando T ≥ 62 °C.
Assuma que:
• O sensor é adequado e sem falhas.
• O sistema térmico é lento (há inércia térmica).
• Não há modulação de potência: apenas ligado ou desligado.
Assinale a alternativa que descreve corretamente o efeito principal da histerese nesse controle.
• LIGA o aquecedor quando T ≤ 58 °C.
• DESLIGA o aquecedor quando T ≥ 62 °C.
Assuma que:
• O sensor é adequado e sem falhas.
• O sistema térmico é lento (há inércia térmica).
• Não há modulação de potência: apenas ligado ou desligado.
Assinale a alternativa que descreve corretamente o efeito principal da histerese nesse controle.
Ano: 2026
Banca:
FUNDATEC
Órgão:
IFC-SC
Prova:
FUNDATEC - 2026 - IFC-SC - Técnico de Laboratório: Automação |
Q4027606
Engenharia de Automação
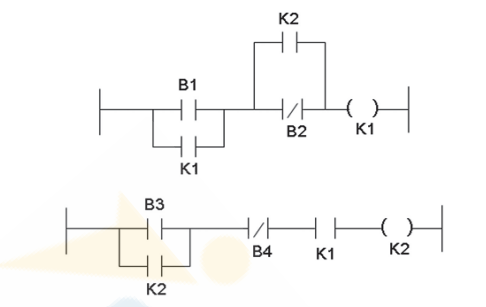
Analise o diagrama Ladder para controle sequencial de dois motores (M1 via bobina
K1, M2 via K2), com botoeiras B1 (liga M1), B3 (liga M2), B2 (para M1), B4 (para M2) abaixo e defina
a sequência obrigatória para ligar M1 e depois M2.
Ano: 2026
Banca:
FUNDATEC
Órgão:
IFC-SC
Prova:
FUNDATEC - 2026 - IFC-SC - Técnico de Laboratório: Automação |
Q4027607
Engenharia de Automação
Em sistemas SCADA, dispositivos RTU/PLC coletam dados de campo via protocolos
como Modbus ou OPC UA, enviando para servidores centrais que geram IHM (Interface
Homem-Máquina) com synópticos, historiadores de tendências e alarmes priorizados. Para
monitoramento eficaz, distinguem variáveis digitais (discretas, ex.: status de válvula) de analógicas
(contínuas, ex.: vazão). Qual alternativa descreve corretamente sua integração em SCADA?
Ano: 2026
Banca:
FUNDATEC
Órgão:
IFC-SC
Prova:
FUNDATEC - 2026 - IFC-SC - Técnico de Laboratório: Automação |
Q4027608
Engenharia de Automação
A figura abaixo apresenta as curvas de calibração de diferentes tipos de termopares,
expressando a relação entre a força eletromotriz (f.e.m.) gerada e a temperatura medida. Em
instrumentação térmica, a análise dessas curvas é fundamental tanto para a calibração quanto para
a seleção do termopar mais adequado a uma aplicação industrial, pois a escolha do sensor deve
considerar, entre outros aspectos, a faixa de temperatura de operação, a sensibilidade metrológica e
o comportamento da resposta ao longo do intervalo de interesse. Em um processo industrial que opera
aproximadamente entre 200 °C e 800 °C, deseja-se selecionar, entre os termopares apresentados na
figura, aquele que ofereça boa sensibilidade, ampla aplicabilidade industrial e adequação à faixa de
medição indicada. 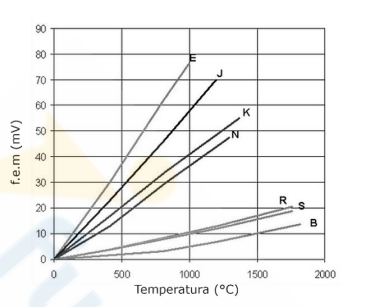
Com base na análise da figura e nos critérios técnicos de seleção de termopares, assinale a alternativa correta.
Com base na análise da figura e nos critérios técnicos de seleção de termopares, assinale a alternativa correta.
Ano: 2026
Banca:
FUNDATEC
Órgão:
IFC-SC
Prova:
FUNDATEC - 2026 - IFC-SC - Técnico de Laboratório: Automação |
Q4027610
Engenharia de Automação
Sobre inversores de frequência para motores de indução trifásicos, analise as
assertivas abaixo e assinale V, se verdadeiras, ou F, se falsas.
( ) A velocidade do motor é controlada variando a frequência de saída do inversor.
( ) Parametrização inclui dados nominais (tensão, corrente, frequência) para proteção.
( ) Rampas curtas de aceleração/desaceleração reduzem solicitação elétrica/mecânica.
( ) Frequência máxima define limite superior de velocidade do motor.
A ordem correta de preenchimento dos parênteses, de cima para baixo, é:
( ) A velocidade do motor é controlada variando a frequência de saída do inversor.
( ) Parametrização inclui dados nominais (tensão, corrente, frequência) para proteção.
( ) Rampas curtas de aceleração/desaceleração reduzem solicitação elétrica/mecânica.
( ) Frequência máxima define limite superior de velocidade do motor.
A ordem correta de preenchimento dos parênteses, de cima para baixo, é:
Ano: 2026
Banca:
FUNDATEC
Órgão:
IFC-SC
Prova:
FUNDATEC - 2026 - IFC-SC - Técnico de Laboratório: Automação |
Q4027615
Engenharia de Automação
Em sistemas de automação, a comunicação CLP-IHM usa protocolos como
Modbus/Profinet para troca de variáveis, afetada por varredura, tráfego e polling. Sendo assim, analise
as assertivas abaixo e assinale V, se verdadeiras, ou F, se falsas.
( ) Protocolo influencia velocidade de atualização das telas por encapsulamento e eficiência de transmissão.
( ) Redes congestionadas causam atraso em leitura/escrita de variáveis com excesso de tags/polling.
( ) Comunicação CLP-IHM é desnecessária; IHM supervisiona sem acesso às variáveis do CLP.
( ) Taxa de atualização da IHM causa defasagem visual, mesmo com CLP executando corretamente.
A ordem correta de preenchimento dos parênteses, de cima para baixo, é:
( ) Protocolo influencia velocidade de atualização das telas por encapsulamento e eficiência de transmissão.
( ) Redes congestionadas causam atraso em leitura/escrita de variáveis com excesso de tags/polling.
( ) Comunicação CLP-IHM é desnecessária; IHM supervisiona sem acesso às variáveis do CLP.
( ) Taxa de atualização da IHM causa defasagem visual, mesmo com CLP executando corretamente.
A ordem correta de preenchimento dos parênteses, de cima para baixo, é:
Ano: 2026
Banca:
FUNDATEC
Órgão:
IFC-SC
Prova:
FUNDATEC - 2026 - IFC-SC - Técnico de Laboratório: Automação |
Q4027617
Engenharia de Automação
Em circuitos digitais combinacionais, os somadores completos são blocos lógicos capazes de realizar a soma de duas variáveis, sendo alguns de dois bits certos contando com um bit de transporte de entrada, normalmente indicado por carry-in (Cin). Como resultado, o circuito produz duas saídas: a soma (S) e o transporte de saída (Cout), conforme a figura abaixo:
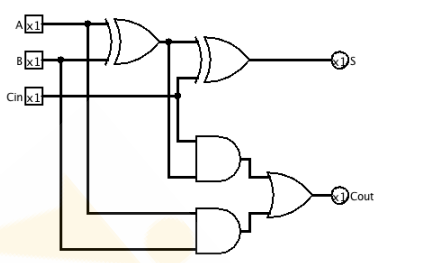
Com base na figura, em que se observa um desses circuitos, e nos fundamentos de circuitos digitais com portas lógicas, assinale a alternativa correta sobre o funcionamento do circuito apresentado.
Ano: 2026
Banca:
FUNDATEC
Órgão:
IFC-SC
Prova:
FUNDATEC - 2026 - IFC-SC - Técnico de Laboratório: Automação |
Q4027619
Engenharia de Automação
Em uma linha de produção, um sensor de pressão precisou ser realocado para um
ponto a 120 m do painel de controle (CLP). O trajeto do cabo passa próximo a inversores de frequência
e contatores, em um ambiente com alto ruído eletromagnético. O engenheiro de automação está
avaliando duas opções de interface analógica com o CLP:
• Opção A: transmissor 2 fios em 4–20 mA alimentado em 24 Vcc, com leitura no CLP via resistor shunt de 250 Ω (convertendo corrente em tensão).
• Opção B: sensor com saída 0–10 V (3 fios), lida diretamente por uma entrada analógica de tensão do CLP.
Considere para a análise:
• Resistência elétrica do cabo (ida + volta) ≈ 12 Ω no total (no percurso).
• Corrente do loop na Opção A varia de 4 mA (0%) a 20 mA (100%).
• O CLP na Opção A mede a tensão no shunt de 250 Ω.
• Na Opção B, o sensor tenta impor 0–10 V no borne de entrada do CLP referenciado ao comum.
Com base no apresentado, assinale a alternativa correta sobre o comportamento dos sinais 4–20 mA e 0–10 V nesse cenário (distância + ruído), considerando também o shunt de 250 Ω na entrada do CLP.
• Opção A: transmissor 2 fios em 4–20 mA alimentado em 24 Vcc, com leitura no CLP via resistor shunt de 250 Ω (convertendo corrente em tensão).
• Opção B: sensor com saída 0–10 V (3 fios), lida diretamente por uma entrada analógica de tensão do CLP.
Considere para a análise:
• Resistência elétrica do cabo (ida + volta) ≈ 12 Ω no total (no percurso).
• Corrente do loop na Opção A varia de 4 mA (0%) a 20 mA (100%).
• O CLP na Opção A mede a tensão no shunt de 250 Ω.
• Na Opção B, o sensor tenta impor 0–10 V no borne de entrada do CLP referenciado ao comum.
Com base no apresentado, assinale a alternativa correta sobre o comportamento dos sinais 4–20 mA e 0–10 V nesse cenário (distância + ruído), considerando também o shunt de 250 Ω na entrada do CLP.
Ano: 2026
Banca:
FUNDATEC
Órgão:
IFC-SC
Prova:
FUNDATEC - 2026 - IFC-SC - Técnico de Laboratório: Automação |
Q4027622
Engenharia de Automação
Em um forno industrial com PID digital, observa-se: oscilação contínua ao redor do
setpoint, recuperação lenta a distúrbios e resposta geral lenta/estável. Qual ajuste melhora o
comportamento?
Ano: 2026
Banca:
FUNDATEC
Órgão:
IFC-SC
Prova:
FUNDATEC - 2026 - IFC-SC - Técnico de Laboratório: Automação |
Q4027623
Engenharia de Automação
Em um sistema de automação industrial, um transmissor de nível mede de 0,0 a
5,0 m e envia ao CLP um sinal analógico de 4–20 mA. Esse sinal é convertido internamente em tensão
e lido por um conversor analógico-digital (CAD) de 12 bits, configurado para representar exatamente
a faixa útil do transmissor. O sistema foi ajustado de modo que:
• 4 mA corresponde a 0,0 m.
• 20 mA corresponde a 5,0 m.
• O CAD utiliza todos os níveis disponíveis para essa faixa.
• Desprezam-se erros de linearidade, offset, ganho e ruídos, considerando apenas a limitação de resolução.
Durante um ensaio, deseja-se avaliar se esse sistema é capaz de distinguir variações muito pequenas de nível no reservatório para fins de controle fino. Com base nessas informações, assinale a alternativa correta sobre a resolução do sistema de digitalização e sua implicação prática na automação.
• 4 mA corresponde a 0,0 m.
• 20 mA corresponde a 5,0 m.
• O CAD utiliza todos os níveis disponíveis para essa faixa.
• Desprezam-se erros de linearidade, offset, ganho e ruídos, considerando apenas a limitação de resolução.
Durante um ensaio, deseja-se avaliar se esse sistema é capaz de distinguir variações muito pequenas de nível no reservatório para fins de controle fino. Com base nessas informações, assinale a alternativa correta sobre a resolução do sistema de digitalização e sua implicação prática na automação.
Ano: 2026
Banca:
FUNDATEC
Órgão:
IFC-SC
Prova:
FUNDATEC - 2026 - IFC-SC - Técnico de Laboratório: Automação |
Q4027624
Engenharia de Automação
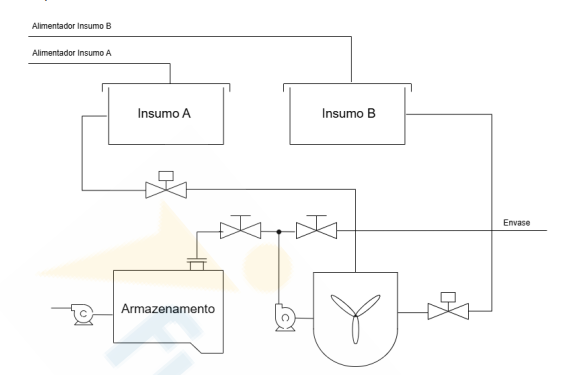
No projeto de automação industrial, o diagrama PFD/P&ID da figura abaixo mostra
uma linha de produção. Com base na figura, qual alternativa identifica corretamente os principais
símbolos e sequência funcional?
Ano: 2026
Banca:
FUNDATEC
Órgão:
IFC-SC
Prova:
FUNDATEC - 2026 - IFC-SC - Técnico de Laboratório: Automação |
Q4027625
Engenharia de Automação
Na comissão de sistemas de propulsão elétrica de alta potência e na manutenção de
painéis industriais, a integridade dos condutores e enrolamentos é validada por ensaios de
continuidade e resistência de isolamento. Enquanto a continuidade assegura que o caminho elétrico
está íntegro para a circulação da corrente nominal, o teste de isolamento (megagem) avalia a
capacidade do dielétrico em suportar tensões de operação e surtos sem permitir correntes de fuga
excessivas. Em máquinas rotativas de grande porte, a simples leitura pontual da resistência de
isolamento pode ser insuficiente, exigindo-se a análise da variação da resistência ao longo do tempo
para diagnosticar a presença de umidade ou contaminação profunda nos materiais isolantes. Sobre
os procedimentos de teste de continuidade e isolamento elétrico em sistemas industriais, assinale a
alternativa tecnicamente correta.