Questões de Concurso Público IF-AM 2022 para Professor PEBTT - Automação/Controle
Foram encontradas 50 questões
Ano: 2022
Banca:
FCM
Órgão:
IF-AM
Prova:
FCM - 2022 - IF-AM - Professor PEBTT - Automação/Controle |
Q4081646
Engenharia de Automação
Considere o diagrama de controle na figura a seguir.
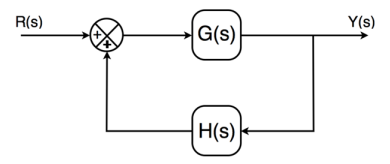
A equação que representa corretamente a relação entre a entrada e a saída deste sistema é
A equação que representa corretamente a relação entre a entrada e a saída deste sistema é
Ano: 2022
Banca:
FCM
Órgão:
IF-AM
Prova:
FCM - 2022 - IF-AM - Professor PEBTT - Automação/Controle |
Q4081647
Engenharia de Automação
Qual função de transferência a seguir é estável e de
fase não-mínima?
Ano: 2022
Banca:
FCM
Órgão:
IF-AM
Prova:
FCM - 2022 - IF-AM - Professor PEBTT - Automação/Controle |
Q4081648
Engenharia de Automação
Considere o gráfico do lugar das raízes associado ao
sistema de controle, conforme figuras a seguir.
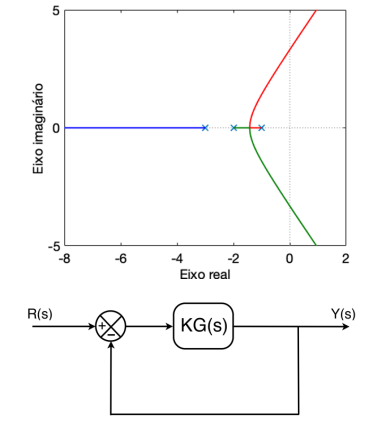
Qual afirmação está INCORRETA?
Qual afirmação está INCORRETA?
Ano: 2022
Banca:
FCM
Órgão:
IF-AM
Prova:
FCM - 2022 - IF-AM - Professor PEBTT - Automação/Controle |
Q4081649
Engenharia de Automação
Considere o sistema de controle na figura a seguir.
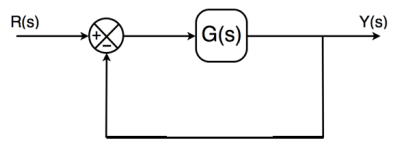
Assinale a função de transferência que apresenta erro em estado estacionário nulo para entrada em degrau unitário e entrada em rampa unitária, mas não apresenta erro nulo em estado estacionário para entrada em parábola unitária.
Assinale a função de transferência que apresenta erro em estado estacionário nulo para entrada em degrau unitário e entrada em rampa unitária, mas não apresenta erro nulo em estado estacionário para entrada em parábola unitária.
Ano: 2022
Banca:
FCM
Órgão:
IF-AM
Prova:
FCM - 2022 - IF-AM - Professor PEBTT - Automação/Controle |
Q4081650
Engenharia de Automação
Considere o sistema definido pelas equações em espaço de estados:
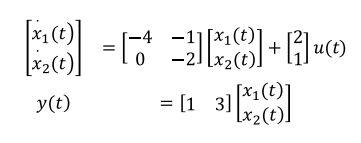
Assinale a função de transferência que representa este sistema.
Assinale a função de transferência que representa este sistema.
Ano: 2022
Banca:
FCM
Órgão:
IF-AM
Prova:
FCM - 2022 - IF-AM - Professor PEBTT - Automação/Controle |
Q4081651
Engenharia de Automação
Qual sistema definido pelas equações em espaço de estados a seguir é instável?
Ano: 2022
Banca:
FCM
Órgão:
IF-AM
Prova:
FCM - 2022 - IF-AM - Professor PEBTT - Automação/Controle |
Q4081652
Engenharia de Automação
Qual sistema definido pelas equações em espaço de estados a seguir é instável?
Ano: 2022
Banca:
FCM
Órgão:
IF-AM
Prova:
FCM - 2022 - IF-AM - Professor PEBTT - Automação/Controle |
Q4081653
Engenharia de Automação
Qual função de transferência a seguir é estável?
Ano: 2022
Banca:
FCM
Órgão:
IF-AM
Prova:
FCM - 2022 - IF-AM - Professor PEBTT - Automação/Controle |
Q4081654
Engenharia de Automação
É INCORRETO afirmar que
Ano: 2022
Banca:
FCM
Órgão:
IF-AM
Prova:
FCM - 2022 - IF-AM - Professor PEBTT - Automação/Controle |
Q4081655
Engenharia de Automação
Sobre controladores é INCORRETO afirmar que
Ano: 2022
Banca:
FCM
Órgão:
IF-AM
Prova:
FCM - 2022 - IF-AM - Professor PEBTT - Automação/Controle |
Q4081656
Engenharia de Automação
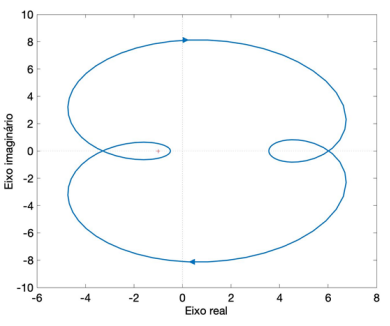
Assinale a alternativa que apresenta os valores da
margem de ganho (MG) e da margem de fase(MF)
que são obtidos pelo diagrama de Nyquist apresentado na figura a seguir
Ano: 2022
Banca:
FCM
Órgão:
IF-AM
Prova:
FCM - 2022 - IF-AM - Professor PEBTT - Automação/Controle |
Q4081657
Engenharia de Automação
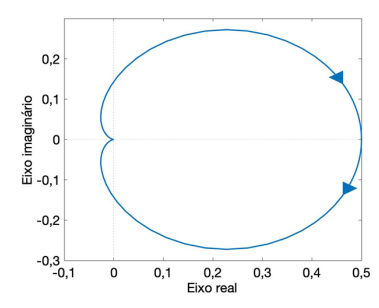
Seja G(s) uma função de transferência estável, cujo
diagrama de Nyquist é apresentado na figura a seguir.
Sendo F(s) = G(s)/1+G(s) , é correto afirmar que
Sendo F(s) = G(s)/1+G(s) , é correto afirmar que
Ano: 2022
Banca:
FCM
Órgão:
IF-AM
Prova:
FCM - 2022 - IF-AM - Professor PEBTT - Automação/Controle |
Q4081658
Engenharia de Automação
Considere o diagrama de Bode apresentado na figura
a seguir.
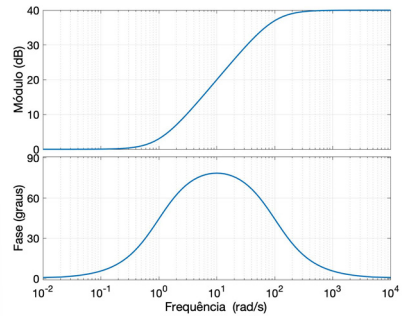
Esse diagrama de Bode apresenta a resposta em frequência de qual tipo de controlador?
Esse diagrama de Bode apresenta a resposta em frequência de qual tipo de controlador?
Ano: 2022
Banca:
FCM
Órgão:
IF-AM
Prova:
FCM - 2022 - IF-AM - Professor PEBTT - Automação/Controle |
Q4081659
Engenharia de Automação
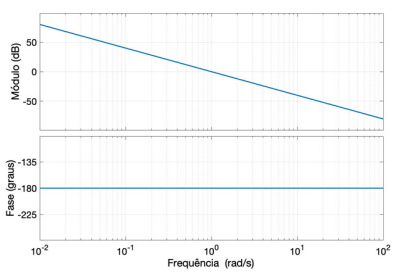
Assinale a alternativa que apresenta os valores da
margem de ganho (MG) e da margem de fase (MF)
que são obtidos pelo diagrama de Bode apresentado
na figura a seguir.
Ano: 2022
Banca:
FCM
Órgão:
IF-AM
Prova:
FCM - 2022 - IF-AM - Professor PEBTT - Automação/Controle |
Q4081660
Engenharia de Automação
Qual abordagem NÃO é utilizada para obter funções
de transferência em tempo discreto cuja resposta
aproxima a resposta de funções de transferência em
tempo contínuo?
Ano: 2022
Banca:
FCM
Órgão:
IF-AM
Prova:
FCM - 2022 - IF-AM - Professor PEBTT - Automação/Controle |
Q4081661
Engenharia de Automação
Assinale a alternativa que descreve o funcionamento de um Controlador Lógico Programável (CLP), considerando-se o seu ciclo de varredura (scan).
Ano: 2022
Banca:
FCM
Órgão:
IF-AM
Prova:
FCM - 2022 - IF-AM - Professor PEBTT - Automação/Controle |
Q4081662
Engenharia Mecatrônica
Assinale a alternativa que contém linguagens de programação de CLPs definidas pela norma IEC 61131-3.
Ano: 2022
Banca:
FCM
Órgão:
IF-AM
Prova:
FCM - 2022 - IF-AM - Professor PEBTT - Automação/Controle |
Q4081663
Engenharia de Automação
Considere a lógica de selo apresentada em linguagem Ladder a seguir para a implementação do acionamento de
um motor por meio de uma botoeira com comando de liga e desliga no campo.

Sobre essa lógica, é correto afirmar que
Sobre essa lógica, é correto afirmar que
Ano: 2022
Banca:
FCM
Órgão:
IF-AM
Prova:
FCM - 2022 - IF-AM - Professor PEBTT - Automação/Controle |
Q4081664
Engenharia de Automação
Um engenheiro, ao se esquecer do ciclo de varredura (scan) de um CLP, escreveu o seguinte programa em Ladder
para a implementação de um comando local/remoto de um motor:

Considere as seguintes afirmações sobre este programa.
I – Se a variável Local estiver acionada, o motor estará desligado.
II – Se a variável Local não estiver acionada, o motor será comandado por meio das variáveis LigaRemoto e DesligaRemoto.
III – Se a variável Local estiver acionada, o motor será comandado por meio das variáveis LigaLocal e DesligaLocal.
IV – Se a variável Local não estiver acionada, o motor estará desligado.
Está correto apenas o que se afirma em
Considere as seguintes afirmações sobre este programa.
I – Se a variável Local estiver acionada, o motor estará desligado.
II – Se a variável Local não estiver acionada, o motor será comandado por meio das variáveis LigaRemoto e DesligaRemoto.
III – Se a variável Local estiver acionada, o motor será comandado por meio das variáveis LigaLocal e DesligaLocal.
IV – Se a variável Local não estiver acionada, o motor estará desligado.
Está correto apenas o que se afirma em
Ano: 2022
Banca:
FCM
Órgão:
IF-AM
Prova:
FCM - 2022 - IF-AM - Professor PEBTT - Automação/Controle |
Q4081665
Engenharia Mecatrônica
Uma esteira transportadora deve ser acionada toda vez que um sensor de detecção de peças é ativado em sua
entrada. A esteira deve ser mantida acionada até que se passem 5 minutos da última vez que o sensor de peças
esteve ativo.
Tendo isso em mente, considere os 3 trechos de programas apresentados a seguir.
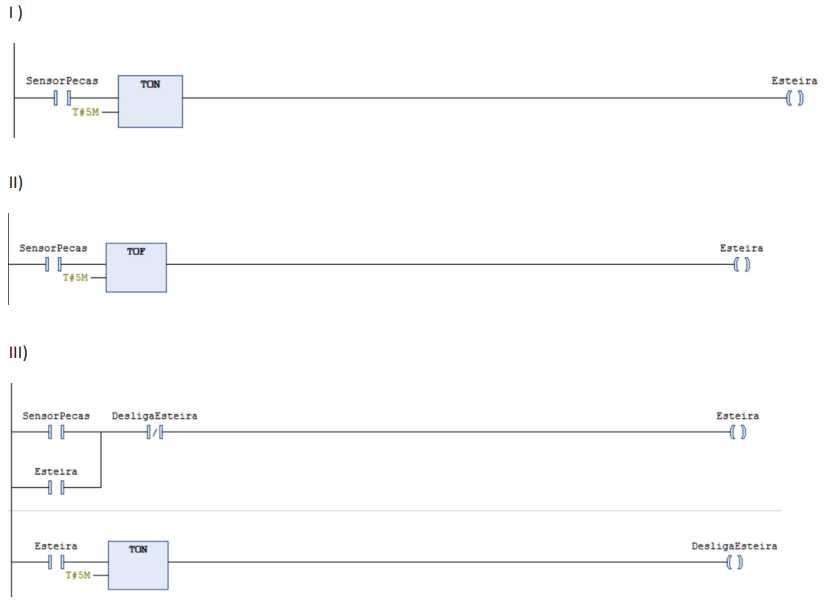
O comportamento desejado é apresentado apenas em
Tendo isso em mente, considere os 3 trechos de programas apresentados a seguir.
O comportamento desejado é apresentado apenas em