Questões de Concurso Público IBGE 2013 para Tecnologista - Cartografia
Foram encontradas 2 questões
Estudo com base nos registros de compras de passagens aéreas permitiu identificar as variações na demanda por voos internacionais entre os anos de 2010 e 2011, representadas no mapa da Figura abaixo.
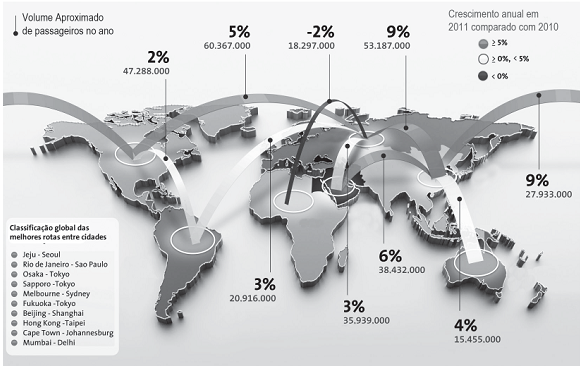
Disponível em: http://amadeus1a.com.br/tag/airconomy/. Acessado em: 2013. Adaptado.
Os elementos contidos na Figura permitem classificá-la como um mapa
O filtro de Kalman é um método recursivo que tem sido utilizado em certas aplicações, tais como o posicionamento cinemático por GPS e a navegação por sistema inercial. A modelagem funcional básica desse método é composta por duas equações matriciais, a das observações e a do modelo dinâmico:
Lb = A . X + V
X2 = T1/2 . X1 + W
Onde:
Lb é o vetor das observações;
A é a matriz dos coeficientes;
X é o vetor das variáveis aleatórias;
X1 é o vetor das variáveis aleatórias em um tempo t1 ;
X2 é o vetor das variáveis aleatórias em um tempo t2 ;
T1/2 é a matriz de transição do tempo t1 para o tempo t2 ;
V é o vetor de ruídos na equação das observações e
W é o vetor de ruídos na equação do modelo dinâmico.
Considerando que E(x), denota a esperança matemática de uma variável x, e Cov(x), a covariância de uma variável x, a afirmação:
Para que se possa aplicar o filtro de Kalman, uma das injunções iniciais é que haja independência estatística entre os ruídos da equação das observações e o modelo dinâmico.
significa que