Questões de Concurso
Sobre sistemas embarcados em engenharia eletrônica
Foram encontradas 239 questões
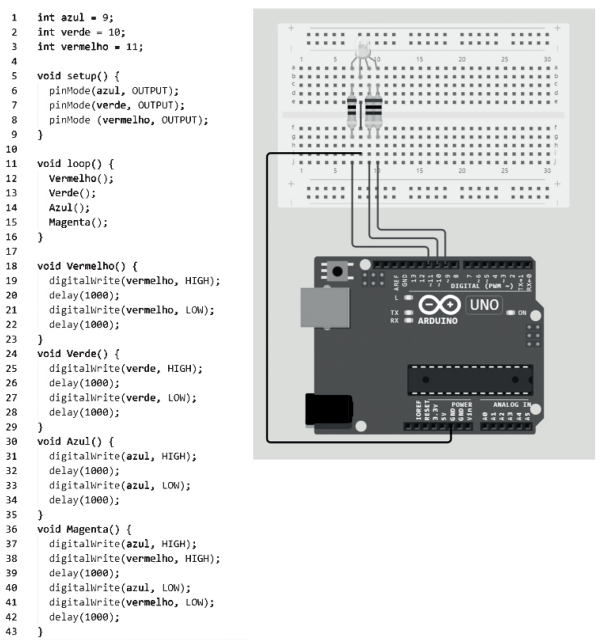
Considere que o código fonte foi compilado, enviado e executado no Arduino. Pode-se afirmar que:
Sobre o microcontrolador ATmega328 e suas funcionalidades de entrada e saída (I/Os), analise as seguintes alternativas e assinale a correta:
No microcontrolador ATmega328 o conversor analógico-digital (ADC) possui uma resolução de 10 bits, permitindo a leitura de valores analógicos entre 0 e 1023. Sabendo que o ADC opera com um clock máximo de 200 kHz e que o Arduino Uno utiliza um clock principal de 16 MHz, qual das seguintes afirmativas descreve corretamente uma característica crítica do processo de conversão analógico-digital nesse microcontrolador?
I. O ADC utiliza um referencial de tensão fixo de 5V, que não pode ser alterado, independentemente da tensão de alimentação do microcontrolador, resultando sempre em uma resolução de 4.88 mV por nível de quantização.
II. O ADC permite o uso de diferentes referências de tensão, como a tensão de alimentação (Vcc), uma referência interna de 1.1V, ou uma tensão externa aplicada ao pino AREF, resultando em diferentes resoluções de quantização.
III. O tempo de conversão de uma leitura analógica para digital é determinado pela frequência do clock do ADC, que pode ser configurada por meio de um prescaler. O tempo de conversão diminui quando o prescaler é configurado para diminuir a frequência do clock do ADC.
IV. O tempo total de conversão de uma leitura analógica para digital depende exclusivamente da frequência de clock do sistema, sendo que quanto maior esta frequência, maior será a taxa de amostragem.
O protocolo SPI (Serial Peripheral Interface) é utilizado em microcontroladores da família ATmega para realizar a comunicação síncrona entre o mestre e um ou mais dispositivos escravos. No contexto de seu funcionamento, qual das seguintes afirmativas descreve corretamente um comportamento desse protocolo?
I. O SPI no ATmega328 pode ser configurado através de registrador específico, sendo o sinal de clock (SCK) gerado pelo mestre, com possibilidade de modificar polaridade e fase (CPOL e CPHA), permitindo maior flexibilidade na comunicação com diferentes dispositivos.
II. O protocolo SPI é half-duplex, o que significa que ambos os dispositivos (mestre e escravo) podem enviar e receber simultaneamente dados, mas também pode ser configurado para funcionar como simplex, isto é, apenas um dispositivo transmite dados (normalmente o mestre).
III. No ATmega328, quando em modo mestre no SPI, o gerenciamento dos pinos SS (Slave Select) é feito de maneira automática, com terminais específicos para cada escravo.
IV. Em um barramento SPI, vários escravos podem compartilhar as mesmas linhas de dados (MOSI e MISO), mas o mestre deve selecionar individualmente cada escravo utilizando a linha SS (Slave Select). Se dois escravos forem ativados ao mesmo tempo, o barramento SPI entra em estado de conflito, o que interrompe automaticamente a comunicação.
O protocolo TWI (Two-Wire Interface), presente nos microcontroladores da família ATmega permite a comunicação entre dispositivos em um barramento compartilhado, como sensores e microcontroladores. Em relação à organização e controle da comunicação no barramento, qual das seguintes afirmativas é verdadeira?
I. No ATmega328 é possível gerar uma interrupção quando reconhecido o endereço configurado mesmo que ele esteja no modo sleep.
II. Durante uma transmissão no protocolo TWI, o dispositivo escravo pode iniciar uma comunicação enviando diretamente um sinal de start para o mestre, eliminando a necessidade de um sinal de start gerado pelo mestre.
III. No barramento, deve haver apenas um mestre, e ele é o único responsável por iniciar e controlar as transações de dados com múltiplos escravos, utilizando sinais de start, stop e ack.
IV. A velocidade de comunicação no barramento é fixada em 100 kHz para todos os dispositivos, independentemente das suas capacidades ou configurações de hardware.
Considere que um timer de 8 bits do microcontrolador ATmega328 com um prescaler configurado para 64. A frequência de clock do sistema é de 16 MHz. Qual será o tempo até o estouro (overflow) desse timer, assumindo que ele está operando no modo normal e inicia com valor zero?
Quanto aos tipos de computadores, ao sistema operacional Windows 11 e aos conceitos de redes de computadores, julgue o item a seguir.
Os computadores embarcados são projetados para realizar tarefas específicas dentro de um sistema maior, por exemplo, em eletrodomésticos e automóveis.
Interrupção é um mecanismo com origem no hardware que possibilita ao processador interromper o fluxo normal de instruções para atender a um evento (1ª parte). O evento pode ser originado por interfaces de I/O, temporizadores ou após a conclusão de determinadas tarefas, como comunicação ou gravação em memória permanente (2ª parte). As interrupções no ESP8266 têm um esquema de prioridades no qual interrupções de prioridade mais baixa podem interromper aquelas de prioridade mais alta (3ª parte).
Quais partes estão corretas?
Com relação a esse requisito, supondo que as portas suportem a corrente dos LEDs e subentendendo a utilização de resistores, caso necessário, analise as afirmativas a seguir.
I. Não é possível, pois o acionamento das teclas vai interferir com os LEDs.
II. As portas devem atuar como saída para acionar os LEDs e como entrada para ler o estado das chaves.
III. Não é possível utilizar uma única porta como entrada e saída na mesma aplicação.
Está correto o que se afirma em