Questões de Concurso
Sobre processamento digital de imagens em engenharia cartográfica
Foram encontradas 72 questões
No que se refere aos fundamentos de sensoriamento remoto, comportamento espectral dos alvos e classificação de imagens, julgue o item subsecutivo.
O conceito básico da técnica de mapeamento por ângulo espectral consiste em tratar a curva de resposta espectral de um alvo como um vetor em um espaço multidimensional, sendo amplamente aplicada na mineralogia para identificação de minerais e em estudos de vegetação.
No que se refere aos fundamentos de sensoriamento remoto, comportamento espectral dos alvos e classificação de imagens, julgue o item subsecutivo.
O uso de tecnologias de inteligência artificial, especialmente de redes neurais artificiais, tem se mostrado insuficiente e inadequado para tratar as principais deficiências o processo de classificação de uma imagem, associadas à resolução do sensor e ao estabelecimento da regra de decisão adotada para designar os pixels à classe.
No que se refere aos fundamentos de sensoriamento remoto, comportamento espectral dos alvos e classificação de imagens, julgue o item subsecutivo.
A reamostragem de dados radiométricos hiperespectrais para bandas de satélites multiespectrais, fundamental na construção de modelos, consiste em aplicar a resposta espectral relativa (RER) dos sensores multiespectrais aos dados hiperespectrais: cada banda de cada sensor orbital possui um RER que indica sua sensibilidade em diferentes comprimentos de onda, o que permite simular a reflectância medida por esses sensores.
A respeito de processamento de imagens digitais, julgue o item subsecutivo.
Filtros espaciais dos tipos passa-baixa e passa-alta geralmente são utilizados para reduzir ruídos e para realçar bordas entre alvos adjacentes, respectivamente.
A respeito de processamento de imagens digitais, julgue o item subsecutivo.
Random Forest, XGBoost e U-Net são algoritmos que fazem parte do grupo de classificadores denominados aprendizagem de máquina.
Julgue o item subsequente, relativo a sensores imageadores.
Sensores imageadores ativos e passivos são sensíveis às variações nas condições de iluminação solar durante o processo de aquisição de imagens da superfície terrestre.
Essas distorções podem surgir de várias fontes, desde variações orbitais do satélite até distorções atmosféricas e erros nos sensores de imagem.
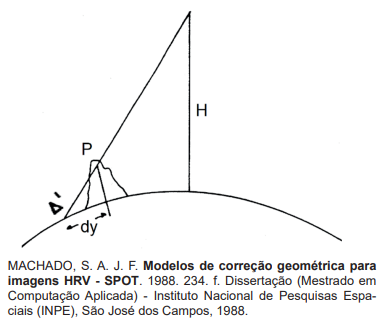
A Figura acima refere-se a um erro no sensor de imagem referente ao
Essa primeira etapa da correção geométrica de imagens é denominada
Relacione algumas das métricas extraídas para a classe vegetação a partir de uma matriz de confusão gerada no contexto de uma classificação de imagem digital de área urbana às suas respectivas descrições.
1. Exatidão do usuário 2. Exatidão do produtor 3. Erro de comissão 4. Erro de omissão
( ) razão entre os achados positivos rotulados corretamente (verdadeiros positivos) e o total de pixels verdadeiramente de vegetação (verdadeiros positivos e falsos negativos). ( ) razão entre os achados positivos rotulados corretamente (verdadeiros positivos de vegetação) e o total de achados positivos (quantidade total de pixels rotulados como vegetação). ( ) razão entre o número de pixels rotulados erroneamente (falsos positivos) e o número total de pontos rotulados na classe vegetação (verdadeiros e falsos positivos). ( ) razão entre o número de pixels que deixaram de ser rotulados (falsos negativos) e o número total de pixels existentes na classe vegetação (verdadeiros positivos e falsos negativos).
Assinale a opção que indica a relação correta, segundo a ordem apresentada.
Sobre a utilização de descritores em dados 2D (imagens ópticas) e 3D (nuvens de pontos adquiridas por LiDAR), assinale a opção que apresenta a correta justificativa.
No caso de serem utilizados conjuntamente dados 2D e 3D adquiridos por sensoriamento remoto, as classes podem ser definidas com base em descritores
Assinale qual é a relação entre o campo de visada angular das câmeras métricas e a área de cobertura das fotografias aéreas.
Assinale como é o termo que indica o ângulo horizontal entre a direção norte-sul e a linha, medido a partir do norte ou do sul na direção da linha, porém, não ultrapassando 90º ou 100 grd:
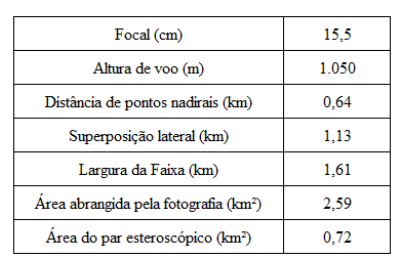

O valor de SL é maior que 65%.