Questões de Concurso
Sobre servomecanismo em engenharia de automação
Foram encontradas 8 questões
Ano: 2026
Banca:
INSTITUTO AOCP
Órgão:
IF-CE
Prova:
INSTITUTO AOCP - 2026 - IF-CE - Professor EBTT - Automação, Sensores e Atuadores |
Q4085153
Engenharia de Automação
Em uma indústria, uma equipe técnica está
projetando o acionamento de um elevador de carga
que deverá: a) elevar cargas pesadas
verticalmente; b) operar com partidas e paradas
frequentes; c) manter torque elevado em baixas
velocidades; d) realizar controle preciso de
velocidade durante aceleração e desaceleração. A
equipe técnica está avaliando as seguintes
possibilidades para o sistema de acionamento: a)
motor de indução trifásico com partida direta, com
controle efetuado com quadro de comando e
contatores; b) motor de indução trifásico com
inversor de frequência; c) servomotor CA com
controle em malha fechada. Considerando os
requisitos da aplicação, as características das
máquinas elétricas e os equipamentos de controle
empregados, os seguintes argumentos foram
apresentados por diferentes membros da equipe:
I. é recomendado utilizar o esquema de partida direta para a aplicação, pois fornece torque adequado para carga e exige reduzida corrente elétrica, particularmente durante o início da partida;
II. o motor com inversor de frequência é adequado para a aplicação proposta e apresenta controle dinâmico equivalente ao servomotor em qualquer condição de carga, sem requisitar a presença de nenhum sensor adicional para controle preciso de velocidade e bastando operação em malha aberta;
III. o servomotor com controle em malha fechada é a solução mais adequada, pois permite alto torque em baixas velocidades, controle preciso de posição e melhor resposta dinâmica.
Está(ão) correto(s) o(s) argumento(s)
I. é recomendado utilizar o esquema de partida direta para a aplicação, pois fornece torque adequado para carga e exige reduzida corrente elétrica, particularmente durante o início da partida;
II. o motor com inversor de frequência é adequado para a aplicação proposta e apresenta controle dinâmico equivalente ao servomotor em qualquer condição de carga, sem requisitar a presença de nenhum sensor adicional para controle preciso de velocidade e bastando operação em malha aberta;
III. o servomotor com controle em malha fechada é a solução mais adequada, pois permite alto torque em baixas velocidades, controle preciso de posição e melhor resposta dinâmica.
Está(ão) correto(s) o(s) argumento(s)
Ano: 2026
Banca:
INSTITUTO AOCP
Órgão:
IF-CE
Prova:
INSTITUTO AOCP - 2026 - IF-CE - Professor EBTT - Automação, Sensores e Atuadores |
Q4085148
Engenharia de Automação
Uma máquina de posicionamento de peças
pesadas em uma indústria automotiva exige o
emprego de manipuladores robóticos com
características de alta precisão, bem como
resposta dinâmica rápida e capacidade de manter
torque mesmo em altas velocidades. Inicialmente,
motores de passo foram utilizados na
implementação do manipulador robótico, porém
um engenheiro responsável decidiu substituir o
atuador por um servomotor com encoder e
controle em malha fechada. Com base nas
características dos motores de passo e
servomotores, bem como nos requisitos
operacionais da aplicação mencionada, assinale a
alternativa que explica corretamente a motivação
do engenheiro em prosseguir com essa mudança.
Ano: 2026
Banca:
IDCAP
Órgão:
UEFS
Prova:
IDCAP - 2026 - UEFS - Analista Universitário - Engenharia de Controle e Automação |
Q4058710
Engenharia de Automação
A precisão no controle de movimento é alcançada por
meio de acionamentos específicos que permitem o
controle de torque, velocidade e posição em máquinas
complexas. Considerando as propriedades de
servomotores e motores de passo, analise as afirmativas
a seguir:
I.O motor de passo opera tipicamente em malha aberta, avançando em incrementos angulares discretos chamados passos, sem a necessidade obrigatória de sensores de posição.
II.Servomotores de Corrente Alternada utilizam obrigatoriamente um sensor de realimentação, como um encoder ou resolver, para fechar a malha de controle de posição.
III.O inversor de frequência atua na variação da velocidade do motor de corrente contínua por meio da alteração da resistência ôhmica das bobinas do estator.
Está correto o que se afirma em:
I.O motor de passo opera tipicamente em malha aberta, avançando em incrementos angulares discretos chamados passos, sem a necessidade obrigatória de sensores de posição.
II.Servomotores de Corrente Alternada utilizam obrigatoriamente um sensor de realimentação, como um encoder ou resolver, para fechar a malha de controle de posição.
III.O inversor de frequência atua na variação da velocidade do motor de corrente contínua por meio da alteração da resistência ôhmica das bobinas do estator.
Está correto o que se afirma em:
Ano: 2023
Banca:
CONSULPAM
Órgão:
Prefeitura de Teutônia - RS
Prova:
CONSULPAM - 2023 - Prefeitura de Teutônia - RS - Professor Ensino Fundamental - Educação Infantil - Informática |
Q4163619
Engenharia de Automação
Na construção de robôs nos meios educacionais, o
estudante combina diversos componentes para a
construção da máquina. Um desses componentes
caracteriza-se por ser um modelo de motor elétrico,
de corrente contínua (CC) e de corrente alternada
(CA), empregado para o posicionamento de alta
precisão, reversão rápida e aplicações de alto
desempenho. Assinale a alternativa que apresenta o
nome deste elemento empregado na robótica.
Ano: 2023
Banca:
CESGRANRIO
Órgão:
Transpetro
Prova:
CESGRANRIO - 2023 - Transpetro - Profissional Transpetro de Nível Superior - Junior: Ênfase 17: Engenharia de Automação |
Q2328636
Engenharia de Automação
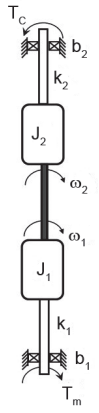
Considere o sistema mecânico de rotação mostrado na
Figura, no qual os eixos 1 e 2 são flexíveis e estão apoiados em mancais que possuem dissipação. O eixo intermediário é suposto rígido e com amortecimento desprezível.
Nessas condições, verifica-se que existe uma
Nessas condições, verifica-se que existe uma
Ano: 2023
Banca:
IF-SP
Órgão:
IF-SP
Prova:
IF-SP - 2023 - IF-SP - Técnico de Laboratório/Área: Mecatrônica |
Q2287674
Engenharia de Automação
Em uma fábrica de eletrônicos, um robô industrial é utilizado para a montagem de placas de
circuito. A velocidade e a precisão do robô são essenciais para garantir a qualidade do produto e otimizar a produção. Nesse contexto, o acionamento
por servomecanismo é fundamental.
O que diferencia um servomecanismo de outros tipos de acionamentos em robótica?
O que diferencia um servomecanismo de outros tipos de acionamentos em robótica?
Ano: 2022
Banca:
FEPESE
Órgão:
CASAN-SC
Prova:
FEPESE - 2022 - CASAN-SC - Engenheiro - Engenharia de Controle e Automação Industrial |
Q4149198
Engenharia de Automação
Motores elétricos estão presentes em diversos
atuadores utilizados no controle e automação de plantas industriais.
Assinale a alternativa correta sobre os motores elétricos.
Assinale a alternativa correta sobre os motores elétricos.
Ano: 2018
Banca:
FUNDEP (Gestão de Concursos)
Órgão:
INB
Prova:
FUNDEP (Gestão de Concursos) - 2018 - INB - Engenheiro de Automação e Controle |
Q1103230
Engenharia de Automação
O surgimento de motores elétricos permitiu avanços
significativos na produção industrial. As máquinas
elétricas rotativas são conhecidas por diversos nomes.
São tipos de máquinas rotativas, EXCETO: