Questões de Concurso Público SEED-PR 2022 para Eixo Tecnológico: Controle e Processos Industriais
Foram encontradas 2 questões
Ano: 2022
Banca:
Instituto Consulplan
Órgão:
SEED-PR
Prova:
Instituto Consulplan - 2022 - SEED-PR - Eixo Tecnológico: Controle e Processos Industriais |
Q2112144
Engenharia Eletrônica
Sobre sintonia de controladores PID, marque V para as afirmativas verdadeiras e F para as falsas.
( ) Na prática, na maioria dos casos, deve-se buscar uma sintonia mais robusta para malhas de controle; portanto, aquelas obtidas para um degrau no setpoint costumam ser mais indicadas de modo geral.
( ) A ação derivativa do controlador PID é mais indicada para processos ruidosos.
( ) O controlador PID é mais indicado para ser utilizado em processos em que a razão de controlabilidade (ou incontrolabilidade para alguns autores) é maior do que 1.
( ) O método de sintonia de Cohen e Coon é mais indicado para processos com atraso de transporte (tempo morto) mais elevado.
( ) O modelo mais utilizado para métodos clássicos de sintonia de controladores PID é baseado no modelo de primeira ordem mais atraso de transporte (tempo morto).
A sequência correta está em
( ) Na prática, na maioria dos casos, deve-se buscar uma sintonia mais robusta para malhas de controle; portanto, aquelas obtidas para um degrau no setpoint costumam ser mais indicadas de modo geral.
( ) A ação derivativa do controlador PID é mais indicada para processos ruidosos.
( ) O controlador PID é mais indicado para ser utilizado em processos em que a razão de controlabilidade (ou incontrolabilidade para alguns autores) é maior do que 1.
( ) O método de sintonia de Cohen e Coon é mais indicado para processos com atraso de transporte (tempo morto) mais elevado.
( ) O modelo mais utilizado para métodos clássicos de sintonia de controladores PID é baseado no modelo de primeira ordem mais atraso de transporte (tempo morto).
A sequência correta está em
Ano: 2022
Banca:
Instituto Consulplan
Órgão:
SEED-PR
Prova:
Instituto Consulplan - 2022 - SEED-PR - Eixo Tecnológico: Controle e Processos Industriais |
Q2112155
Engenharia Eletrônica
Analise a imagem e considere: Gc1 e Gc2 controladores PID e autovalores reais e distinto.
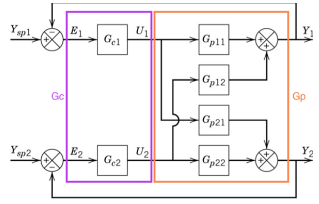
Para facilitar o ajuste dos controladores PID é necessário projetar uma realimentação de estados por alocação de polos, de forma que o sistema dinâmico equivalente no espaço de estados esteja na forma canônica: