Questões da Prova CESPE - 2010 - INMETRO - Pesquisador - Engenharia Eletrônica
Foram encontradas 3 questões
Resolva questões gratuitamente!
Junte-se a mais de 4 milhões de concurseiros!
Ano: 2010
Banca:
CESPE / CEBRASPE
Órgão:
INMETRO
Prova:
CESPE - 2010 - INMETRO - Pesquisador - Engenharia Eletrônica |
Q112748
Engenharia Eletrônica

Na situação acima, para que o sistema em malha fechada seja estável e sobreamortecido, o valor de k1 deve ser
Ano: 2010
Banca:
CESPE / CEBRASPE
Órgão:
INMETRO
Prova:
CESPE - 2010 - INMETRO - Pesquisador - Engenharia Eletrônica |
Q112745
Engenharia Eletrônica
Um sistema dinâmico linear, causal e invariante no tempo, é modelado pela função de transferência G (s) =  , no SI. Deseja-se implementar um controlador proporcional para esse sistema, segundo o diagrama de blocos mostrado abaixo, em que X(s) e Y(s) representam a transformada de Laplace da entrada e da saída do sistema em malha fechada, respectivamente, e kp é o ganho
, no SI. Deseja-se implementar um controlador proporcional para esse sistema, segundo o diagrama de blocos mostrado abaixo, em que X(s) e Y(s) representam a transformada de Laplace da entrada e da saída do sistema em malha fechada, respectivamente, e kp é o ganho
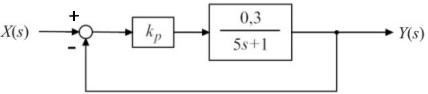
Considerando essas informações, assinale a opção que apresenta o valor do ganho kp de forma que a constante de tempo em malha fechada, no diagrama mostrado, seja de meio segundo.
, no SI. Deseja-se implementar um controlador proporcional para esse sistema, segundo o diagrama de blocos mostrado abaixo, em que X(s) e Y(s) representam a transformada de Laplace da entrada e da saída do sistema em malha fechada, respectivamente, e kp é o ganhoConsiderando essas informações, assinale a opção que apresenta o valor do ganho kp de forma que a constante de tempo em malha fechada, no diagrama mostrado, seja de meio segundo.
Ano: 2010
Banca:
CESPE / CEBRASPE
Órgão:
INMETRO
Prova:
CESPE - 2010 - INMETRO - Pesquisador - Engenharia Eletrônica |
Q112711
Engenharia Eletrônica

Considerando o circuito acima, caso os sinais ei(t) e e0(t) sejam representados, no domínio da transformada de Laplace, por Et(s) e E0(s) respectivamente, então a expressão H(s) =  é igual a
é igual a
é igual a